
เกี่ยวกับ Wanno Academy
ผมอยากจะเปิดสถานศึกษาที่เน้นการสอนความรู้ที่เกี่ยวกับการออกแบบระบบควบคุมและการใช้งานระบบควบคุมโดยเฉพาะ ผมเลยได้จัดตั้งสถานศึกษาที่สอนและให้คำปรึกษาศาสตร์ด้านระบบควบคุม โดยตั้งชื่อตามชื่อของผมว่า “Wanno Academy”
ที่มา Wanno Academy
ผมได้เริ่มเป็นอาจารย์สอนในศาสตร์ด้านวิศวกรรมระบบควบคุม (Control Systems Engineering) ในมหาวิทยาลัยที่กรุงเทพมหานครในปี พ.ศ. 2550 และได้ลาออกในปี พ.ศ. 2563 สาเหตุที่ลาออกเพราะผมอยากจะเปิดสถานศึกษาที่เน้นการสอนความรู้ที่เกี่ยวกับการออกแบบระบบควบคุมและการใช้งานระบบควบคุมโดยเฉพาะ ผมได้ค้นพบว่าเมื่อผมได้อยู่กับงานด้านนี้แล้ว เมื่อได้พบเจอปัญหาใหม่ในระบบควบคุมที่ผมไม่เคยเจอ ผมจะมีความอยากจะเข้าใจและอยากจะแก้ไขเพื่อหาทางออกให้กับปัญหานั้นให้ได้ ผมเลยรู้แล้วว่านี้คืองานที่ใช่สำหรับผม เมื่อผมได้แก้ปัญหาอย่างนี้บ่อยครั้งขึ้น ทำให้ผมมีประสบการณ์มากพอในงานด้านนี้ บวกกับประสบการณ์ของผมในการออกแบบตัวควบคุมในงานวิจัยตอนศึกษาปริญญาเอกของผม ผมเลยอยากนำประสบการณ์ทางด้านศาสตร์ระบบควบคุมมาสอนและแก้ปัญหาให้กับผู้คน ผมเลยได้จัดตั้งสถานศึกษาที่สอนและให้คำปรึกษาศาสตร์ด้านระบบควบคุมโดยเฉพาะ โดยตั้งชื่อตามชื่อของผมว่า “Wanno Academy”

ประวัติผู้ก่อตั้ง Wanno Academy
ชื่อ-สกุล : นายวัณโน ยีตำ
Name-Last name : Mr.Wanno Yeetum
การศึกษา
ปริญญาตรี : วศ.บ. วิศวกรรมไฟฟ้า สาขาย่อยวิศวกรรมระบบวัดคุม คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีมหานคร
ปริญญาโท : วศ.ม. วิศวกรรมไฟฟ้า สาขาย่อยวิศวกรรมระบบวัดคุม คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีมหานคร
ปริญญาเอก : วศ.ด. วิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ สถาบันเทคโนโลยีพระจอมเกล้าเจ้าคุณทหารลาดกระบัง
ในระหว่างการศึกษาปริญญาเอกนั้น ผมรู้สึกภาคภูมิใจเป็นอย่างยิ่งที่งานวิจัยของผมได้รับการตีพิมพ์ในวารสาร IEEE Transactions on Industrial Electronics คือ
“Parallel Active Power Filter Based on Source Current Detection for Antiparallel Resonance with Robustness to Parameter Variations in Power Systems”
(กดที่นี้ เพื่อไปยังหน้างานวิจัยนี้ในเว็บไซต์ IEEE)
ในงานวิจัยนี้ผมได้ใช้ประสบการณ์ ความรู้ ความสามารถทั้งหมด ด้านการออกแบบระบบควบคุม เพื่อทำให้งานวิจัยชิ้นนี้ออกมามีคุณภาพที่ดีจนได้รับการตีพิมพ์ ซึ่งคนในวงการวิชาการทางวิศวกรรมไฟฟ้าจะรู้กันดีว่าวารสารฉบับนี้มีความยากอย่างไรกว่าจะได้รับการตีพิมพ์
ความเชี่ยวชาญของผม
ผมได้ใช้เวลาประมาณ 1 ปี หลังจากลาออกจากงาน ในการจัดเตรียมอุปกรณ์ ออกแบบและทำวิจัยเพื่อให้ได้ความรู้ที่เกี่ยวกับการควบคุมที่สามารถเข้าใจได้ง่าย ด้วยระยะเวลาประมาณ 1 ปี ที่ผมได้ทำการวิจัยทำให้ผมมีความเข้าใจและมีความความรู้เกี่ยวกับงานด้านระบบควบคุมเพิ่มมากขึ้นเป็นอย่างมาก สิ่งที่ผมจะกล่าวต่อไปหลังจากนี้เป็นงานวิจัยที่ผมได้ทำการวิจัยตลอดระยะเวลาประมาณ 1 ปี (เรียงจากง่ายไปหายาก)
การใช้แพลตฟอร์มของ Arduino ในการเรียรรู้ระบบควบคุม
ปัจจุบันแพลตฟอร์มของ Arduino ได้รับความนิยมและมีการใช้งานกันอย่างแพร่หลายเป็นอย่างมาก เป็นเพราะ
- ราคาบอร์ดไมโครคอนโทรลเลอร์ของ Arduino มีราคาไม่แพงมากนัก
- ซอฟต์แวร์ของ Arduino สามารถใช้งานได้ฟรี
- ซอฟต์แวร์ของ Arduino สามารถเขียนโปรแกรมได้ง่าย
- มีผู้ใช้งานเป็นจำนวนมาก นั้นหมายถึงเมื่อผู้เรียนประสบปัญหาในการเขียนโปรแกรม ก็สามารถที่จะค้นหาเพื่อแก้ไขปัญหาที่เกิดขึ้นได้ง่ายในอินเตอร์เน็ต
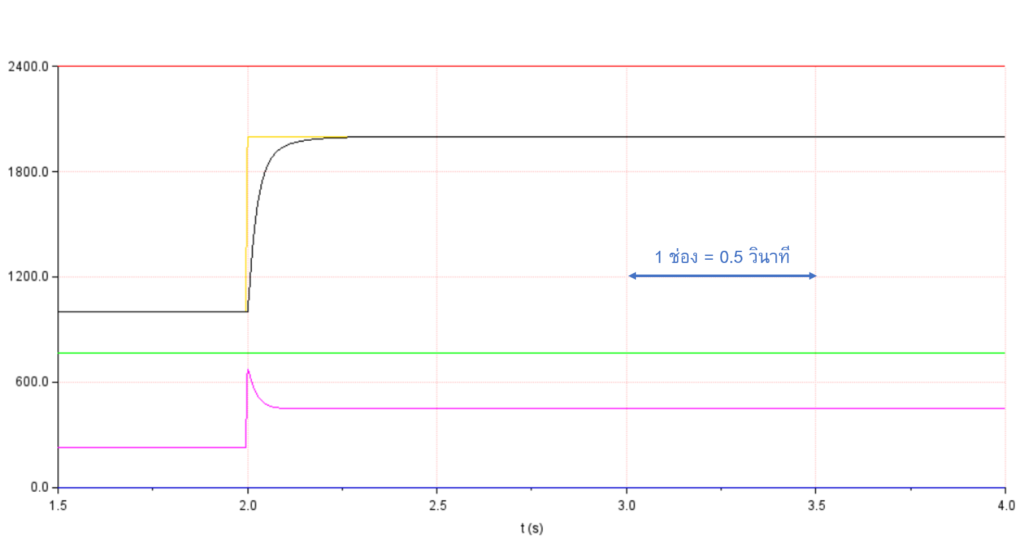
ผมได้เล็งเห็นถึงข้อดีต่างๆ ของแพลตฟอร์ม Arduino ดังที่ได้กล่าวผ่านมาแล้ว ประกอบกับแพลตฟอร์มของ Arduino มีเครื่องมือพื้นฐานที่เพียงพอในการเรียนรู้เกี่ยวกับระบบควบคุมเบื้องต้น ดังนั้นผมจึงได้ทำการศึกษาเพื่อหาวิธีที่จะนำเอาทฤษฎีระบบควบคุมมาประยุกต์ใช้กับแพลตฟอร์มของ Arduino เพื่อการเรียนรู้ระบบควบคุม ตัวอย่างเช่น การใช้ Serial Plotter ของ Arduino IDE ในการแสดงผลตัวแปรต่างๆ ของระบบควบคุมความเร็วรอบของมอเตอร์ไฟฟ้ากระแสตรงด้วยตัวควบคุม PID ดังรูป
ผลตอบสนองเมื่อตัวแปรอ้างอิงมีการเปลี่ยนแปลง
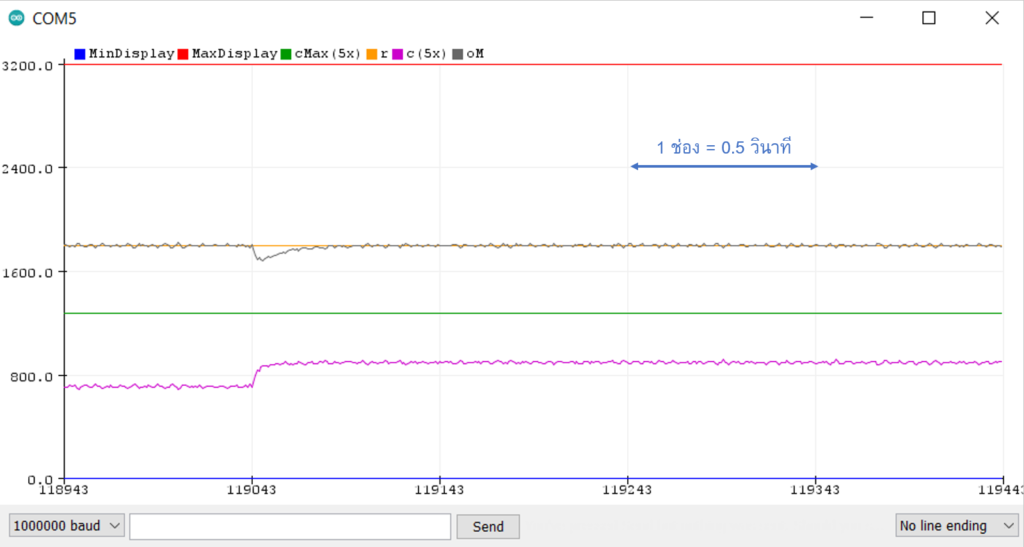
ผลตอบสนองเมื่อต่อโหลดเข้าสู่ระบบ
จากรูปจะเห็นได้ว่าผมได้ออกแบบการจัดวางการแสดงผลตัวแปรต่างๆ ของระบบควบคุมซึ่งมีหลายตัวแปรด้วยกันได้อย่างชัดเจนและเหมาะสมเพื่อความสะดวกในการวิเคราะห์เพื่อปรับแต่งตัวควบคุม PID ให้ได้ผลตอบสนองตามที่ต้องการ จากรูปตัวแปรต่างๆ คือ
- สีเหลือง (r) คือ ตัวแปรอ้างอิง (ค่าเป้าหมายที่ต้องการ)
- สีดำ (oM) คือ ตัวแปรเอาต์พุตที่วัดได้ของระบบ
- สีม่วง (c) คือ ตัวแปรควบคุม
- สีเขียว (cMax) คือ ค่ามากสุดของตัวแปรควบคุม ใช้เพื่อดูว่าตัวแปรควบคุมได้ถึงจุดสูงสุดแล้วหรือไม่ ซึ่งเป็นส่วนที่สำคัญมากในการวิเคราะห์ผลตอบสนองของตัวควบคุม PID
- 5x คือ ค่าตัวแปรนี้ได้ถูกขยายสัญญาณ 5 เท่า เนื่องจากค่าเดิมของตัวแปนี้มีขนานเล็ก จึงจำเป็นต้องขยายให้ใหญ่ขึ้น เพื่อความชัดเจนในการวิเคราะห์สัญญาณ
อีกประการที่สำคัญมากคือ ในเรื่องการอ่านค่าเวลาจากผลการทดลอง ซึ่งค่าเวลาเราสามารถอ่านได้จากแกน x ของรูป การเขียนโปรแกรมโดยทั่วไปแล้วค่าเวลาในแกน x จะมีการเปลี่ยนแปลงไม่คงที่ขึ้นอยู่กับลักษณะการทำงานในแต่ละรอบของโปรแกรม ทำให้เราไม่สามารถอ่านค่าเวลาที่แท้จริงได้ แต่จากระบบที่ผมได้วางไว้ในการเขียนโปรแกรมควบคุมจะได้ว่า 1 ช่องในแนวแกน x คือเวลา 0.5 วินาที (ค่านี้สามารถปรับเปลี่ยนได้ให้เหมาะสมกับระบบที่เรากำลังควบคุม) ซึ่งการทำให้เวลาตรงนี้นิ่งได้ไม่เปลี่ยนแปลง สำคัญมากเพราะจะส่งผลต่อการจูนตัวควบคุม PID
จะเห็นได้ว่าการใช้งาน Serial Plotter ของ Arduino IDE ในการแสดงผลของตัวแปรต่างๆ นั้นสามารถทดแทนการใช้ออสซิลโลสโคป (Oscilloscope) ในการวัดสัญญาณเพื่อวิเคราะห์ในระบบควบคุมได้เป็นอย่างดี ซึ่งท่านสามารถดูสัญญาณต่างๆ ของระบบควบคุมได้โดยไม่ต้องมีออสซิลโลสโคป
รายละเอียดในการที่จะทำให้ได้กราฟดังรูปและการเขียนโปรแกรมควบคุม PID จะอยู่ในคอร์สตัวควบคุม PID ขั้นพื้นฐาน หากท่านสนใจลองคลิกที่นี้เพื่อไปดูรายละเอียดของคอร์สนี้กันครับ
การจูนตัวควบคุม PID
หากท่านเคยได้ลองจูนตัวควบคุม PID ท่านจะรู้ว่าการจูนตัวควบคุม PID ให้ได้ผลตอบสนองตามที่ท่านต้องการนั้นมันเป็นเรื่องยากเลยที่เดียว ปัญหาที่ท่านอาจจะเคยเจอได้แก่ การเกิดค่าความผิดพลาด การเกิดการพุ่งเกินที่สูง เกิดการแกว่งไปมาก่อนที่สัญญาณจะนิ่งเป็นต้น
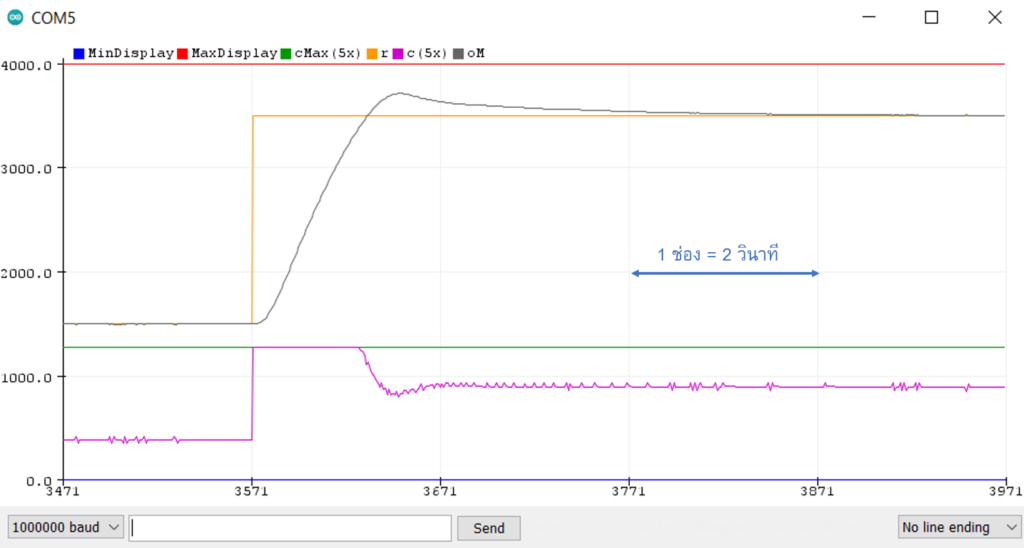
ผลตอบสนองของวิธี Chien-Hrones-Reswick
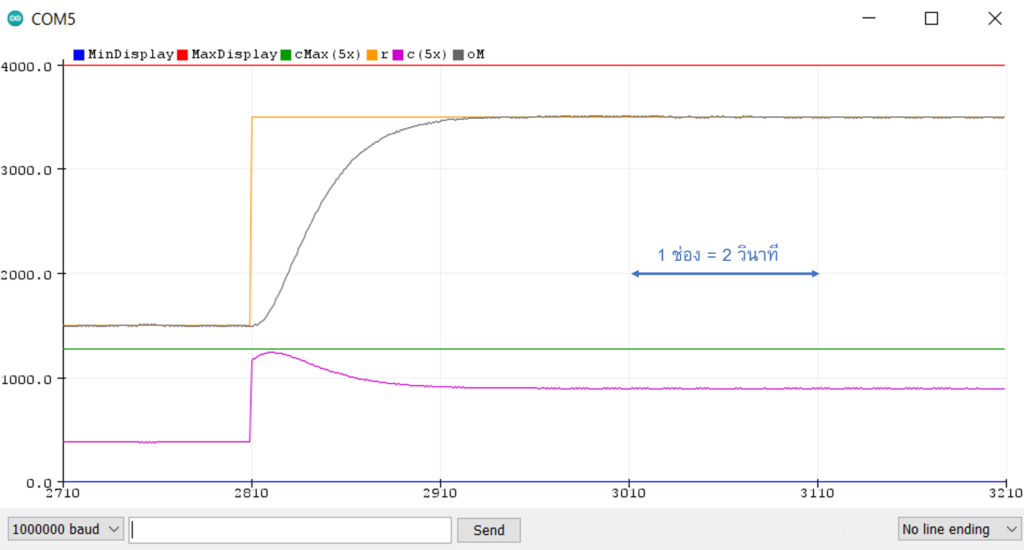
ผลตอบสนองของวิธีที่ผมได้วิจัย
จากปัญหาต่างๆ ที่ได้กล่าวผ่านมา ผมเลยได้วิจัยเพื่อหาขั้นตอนการจูน PID เพื่อแก้ปัญหาต่างๆ เหล่านั้น ซึ่งผมก็ได้ทำสำเร็จแล้ว โดยขั้นตอนในการจูนตัวควบคุม PID ของผมจะทำให้ได้คุณสมบัติในการจูนดังนี้คือ
- ผลตอบสนองของตัวแปรเอาต์พุตมีช่วงเวลาเข้าที่รวดเร็วในแต่ละช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้
- ไม่เกิดการพุ่งเกินและการพุ่งต่ำของตัวแปรเอาต์พุตในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้
- ตัวแปรควบคุมของตัวควบคุม PID ไม่เกิดการอิ่มตัวในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้ขณะทำการควบคุม (ตัวแปรควบคุมอาจจะถึงค่าสูงสุดเพียงแค่นิดเดียว แต่จะไม่ส่งผลอย่างมีนัยสำคัญต่อการควบคุม)
- รูปร่างของตัวแปรเอาต์พุตจะไม่มีการเปลี่ยนแปลงหรือเปลี่ยนแปลงน้อยมากเมื่อมีการเปลี่ยนแปลงภายในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้
ตัวอย่างเช่น จากรูปเป็นการเปรียบเทียบผลการควบคุมตัวเลียนแบบระบบด้วยตัวควบคุม PID โดยใช้วิธีของ Chien-Hrones-Reswick (CHR) ซึ่งเป็นวิธีในการหาอัตราขยายตัวควบคุม PID ที่ดีวิธีหนึ่งที่ใช้กันอยู่ในปัจจุบันกับวิธีการจูน PID ที่ผมได้วิจัย จะเห็นได้ว่าทั้ง 2 วิธีนั้นสามารถทำให้ตัวแปรเอาต์พุตที่วัดได้ c สามารถเข้าสู่ค่าอ้างอิง r ได้ตามที่ต้องการ แต่วิธีที่ผมได้วิจัยไม่เกิดการพุ่งเกินของตัวแปรเอาต์พุตและมีช่วงเวลาเข้าที่ (Settling time) ที่รวดเร็วกว่า
รายละเอียดและขั้นตอนในการจูนตัวควบคุม PID เพื่อให้ได้คุณสมบัติดังที่ได้กล่าวมานั้นได้อยู่ในคอร์สการจูนตัวควบคุม PID หากท่านสนใจลองคลิกที่นี้เพื่อไปดูรายละเอียดของคอร์สนี้กันครับ
การออกแบบระบบควบคุม
หากท่านมีความเชี่ยวชาญด้านการออกแบบระบบควบคุมที่มากพอ ผลการควบคุมระบบของท่านไม่ว่าจะเป็น การควบคุมระบบจริง การควบคุมตัวเลียนแบบระบบจริง (Emulator) หรือการจำลองระบบควบคุมด้วยโปรแกรมคอมพิวเตอร์ ผลการทดลองที่ได้จากทั้ง 3 อย่างนี้จะใกล้เคียงหรือเหมือนกันมาก

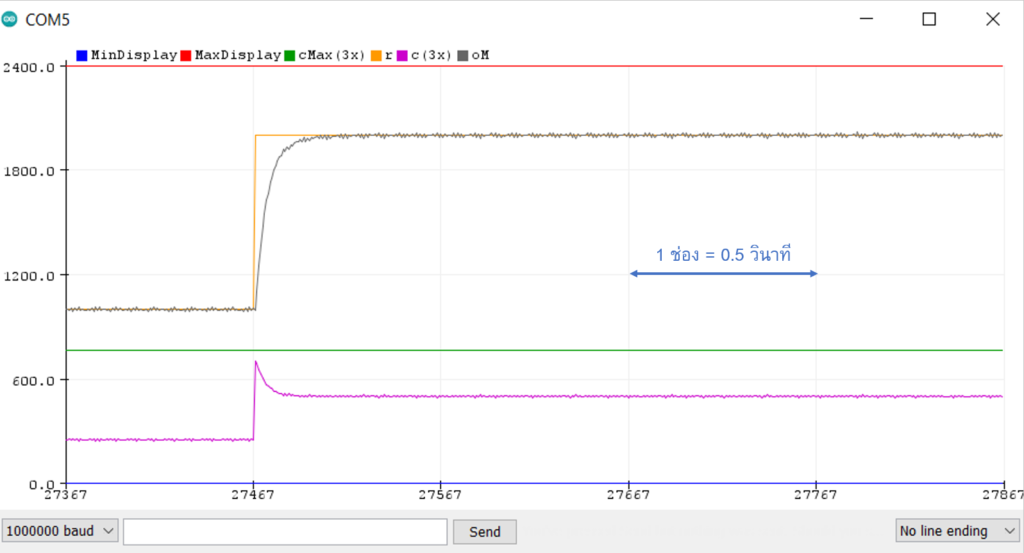
รูปบน: ผลการควบคุมระบบจริง
รูปกลาง: ผลการควบคุมตัวเลียนแบบระบบจริง
รูปล่าง: ผลการจำลองการควบคุมระบบด้วยโปรแกรมคอมพิวเตอร์
หากท่านเคยทำวิจัยด้านระบบควบคุมไม่ว่าจะในระดับ ป.ตรี ป.โท หรือ ป.เอก ท่านจะทราบดีว่า การจะทำให้ผลการทดลองที่ได้จากทั้ง 3 อย่างนี้จะใกล้เคียงหรือเหมือนกันมากเป็นเรื่องยากมาก เพราะมันมีปัจจัยต่างๆ มากมายที่จะทำให้ผลออกมาไม่เหมือนกัน ต้องเป็นผู้ที่มีประสบการณ์มากด้านระบบควบคุมถึงจะทำให้ผลออกมาใกล้เคียงหรือเหมือนกันมาก ผมมีตัวอย่างที่ผมได้ทดลองทำไว้ เช่น ระบบควบคุมความเร็วรอบของมอเตอร์ ซึ่งมีผลการทดลองของทั้ง 3 แบบดังรูป
จากผลการทดลองจะเห็นได้ว่าทั้ง 3 ผลการทดลองนั้นมีผลการทดลองใกล้เคียงกันมาก นั้นเพราะถ้าเราทำถูกต้องตามทฤษฎีระบบควบคุม ผลที่ได้จากระบบจริง จากตัวเลียนแบบและจากการจำลองด้วยโปรแกรมคอมพิวเตอร์ก็จะสอดคล้องซึ่งกันและกัน โดยทั้ง 3 การทดลองใช้ค่าอัตราขยายของตัวควบคุม PID คือ Kp, Ki และ Kd ค่าเดียวกันโดยไม่ต้องปรับแต่งค่าใหม่เพื่อให้ผลตอบสนองเหมือนกันแต่อย่างใ
หมายเหตุ: ผมใช้โปรแกรม Scilab/Xcos ซึ่งเป็นโปรแกรมฟรีที่มีประสิทธิภาพ ในการจำลองการทำงานของระบบควบคุม
หากท่านมีความสนใจอยากทำให้การควบคุมระบบจริง การควบคุมตัวเลียนแบบระบบจริง และการจำลองระบบควบคุมด้วยโปรแกรมคอมพิวเตอร์ มีผลที่สอดคล้องซึ่งกันและกัน การทำให้ได้อย่างนี้เป็นเรื่องละเอียด ต้องพูดคุยแบบตัวต่อตัว ติดต่อมาพูดคุยกับผมเป็นการเบื้องต้นก่อนครับ ผมยินดีที่จะให้คำแนะนำครับ
สรุปส่งท้าย
ที่ได้กล่าวผ่านมาทั้งหมดนั้น (ซึ่งอาจจะยาวหน่อย) เป็นการบอกกล่าวถึงตัวผมเพื่อให้ท่านได้รู้จักผม ได้รู้ว่าผมมีความเชี่ยวชาญและมีประสบการณ์อะไรบ้าง (เพราะถ้าไม่บอกกล่าวยาวๆ แล้วท่านก็จะไม่รู้รายละเอียดว่าผมมีความเชี่ยวชาญและมีประสบการณ์อะไรบ้าง) หากท่านได้อ่านเรื่องราวทั้งหมดแล้วคิดว่าน่าสนใจและมีประโยชน์ต่อท่าน ติดต่อมาพูดคุยกับผมได้ครับ มาพูดคุยเรื่องราวที่ท่านสนใจ เราจะได้รู้จักกัน บางครั้งผมอาจจะช่วยให้ท่านประสบความสำเร็จในสิ่งที่ท่านกำลังเผชิญอยู่ก็ได้ครับ
ติดต่อ Wanno Academy
(เมื่อเข้า Wanno Acedemy ได้แล้ว กดส่งข้อความ เพื่อเริ่มพูดคุยกับผมได้เลยครับ)
หรือสามารถส่ง Email มาได้ที่
wanno.acad@gmail.com
สุดท้ายนี้ด้วยประสบการณ์ของผมที่ผ่านมาอยากจะบอกท่านว่า การเรียนรู้ในเรื่องต่างๆ ในโลกใบนี้ หากท่านได้เรียนรู้กับผู้รู้ที่มีความเชี่ยวชาญและมีประสบการณ์ในเรื่องนั้นๆ โดยตรง จะช่วยให้ท่านเรียนรู้ได้อย่างไม่หลงทาง ไม่ต้องลองผิดลองถูก ทำให้ท่านเรียนรู้ได้อย่างรวดเร็ว ประหยัดเวลา เพื่อที่ท่านจะได้เอาเวลาที่ท่านประหยัดมาได้นี้ ไปทำเรื่องอื่นๆ ที่สำคัญสำหรับชีวิตของท่านซึ่งมีอีกมากมายหลายเรื่องต่อไป
Wanno Academy
โดย วัณโน ยีตำ