บทนี้จะเป็นการสอนการใช้งานบอร์ดไมโครคอนโทรลเลอร์รุ่น UNO ร่วมกับโปรแกรม Arduino IDE เพื่อวัดแล้วแสดงผลสัญญาณและส่งค่าออกจากไมโครคอนโทรลเลอร์เพื่อควบคุมระบบ
ตัวอย่างส่วนหนึ่งจากเนื้อหาในบทนี้
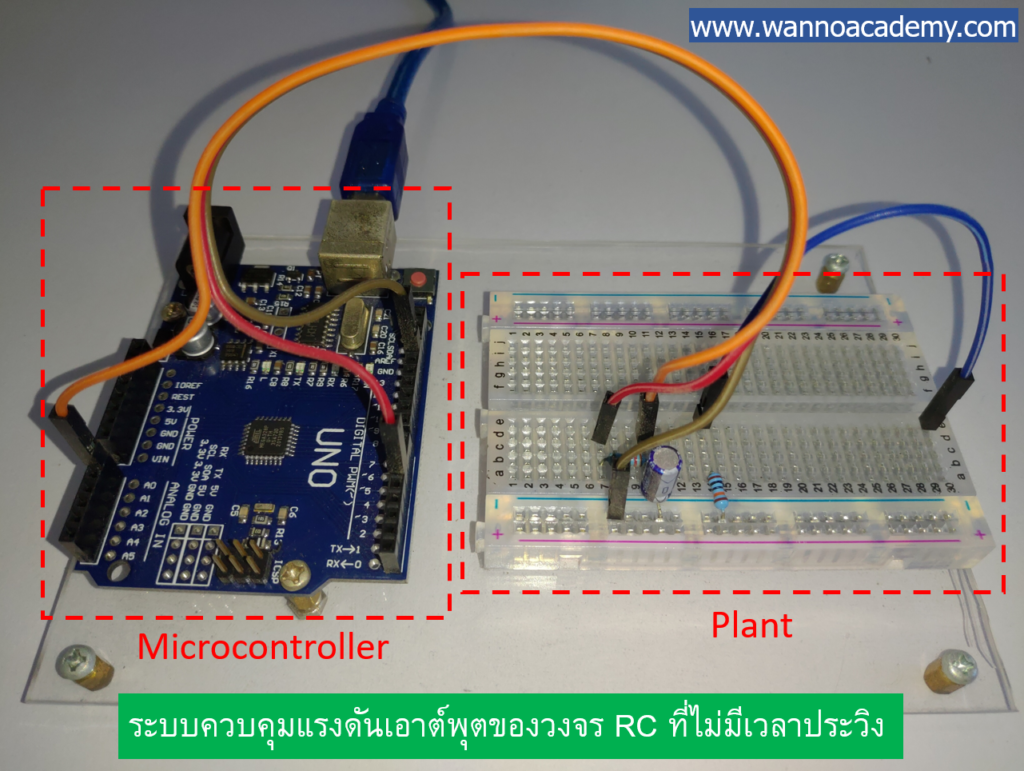
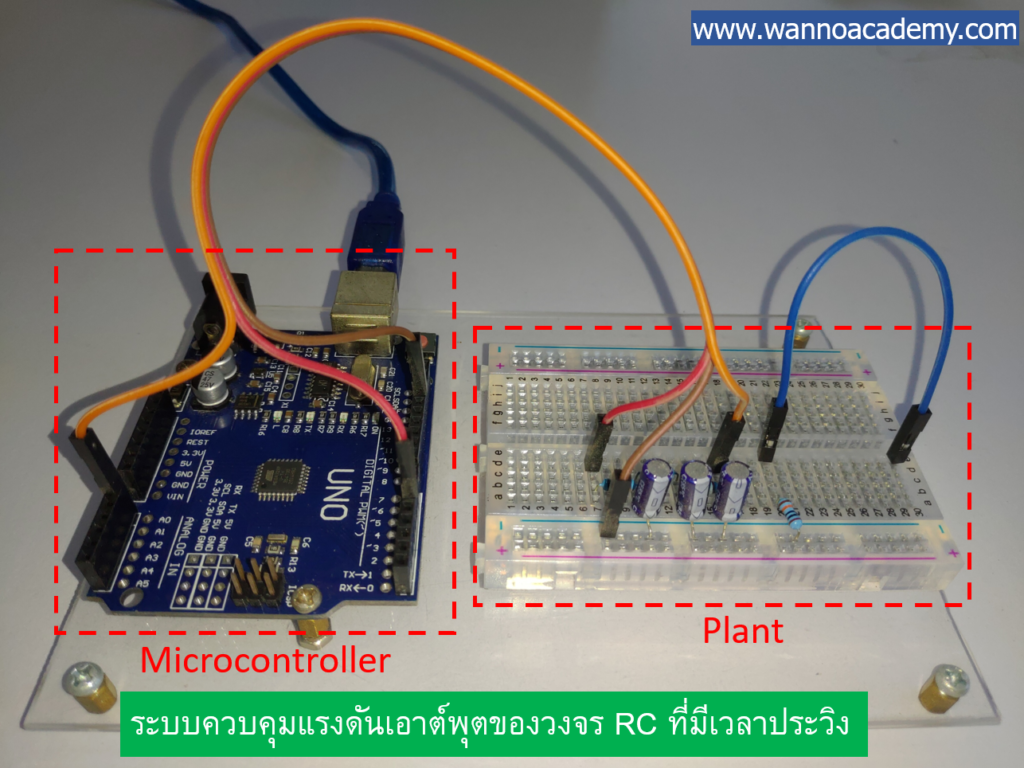
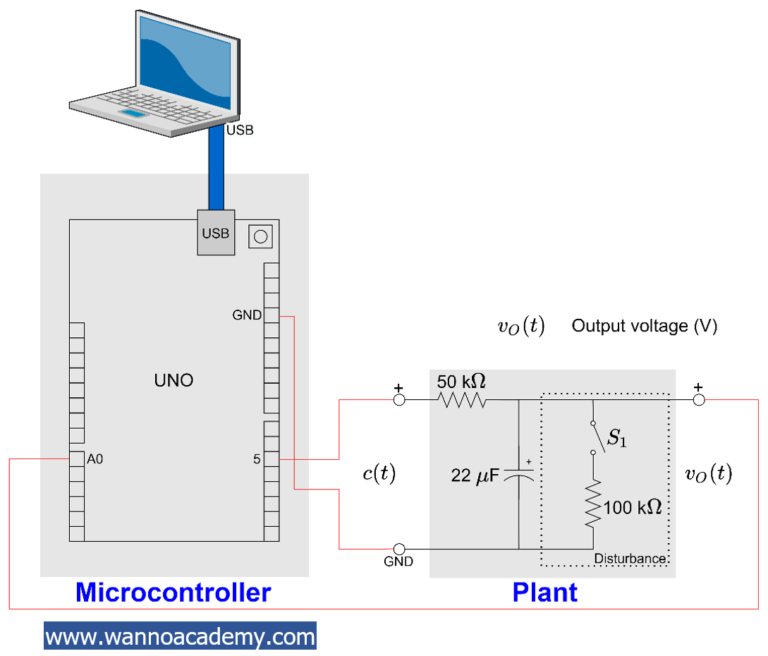
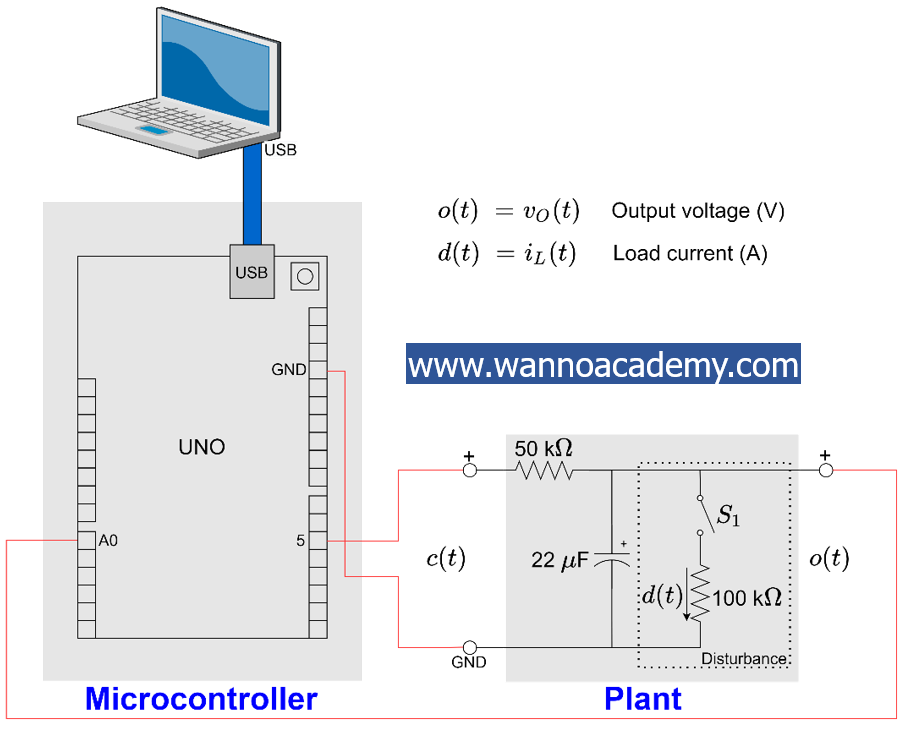
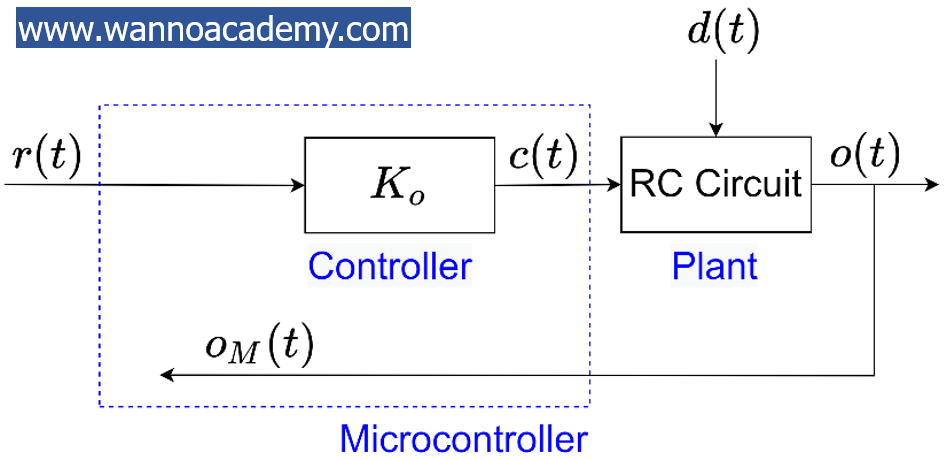
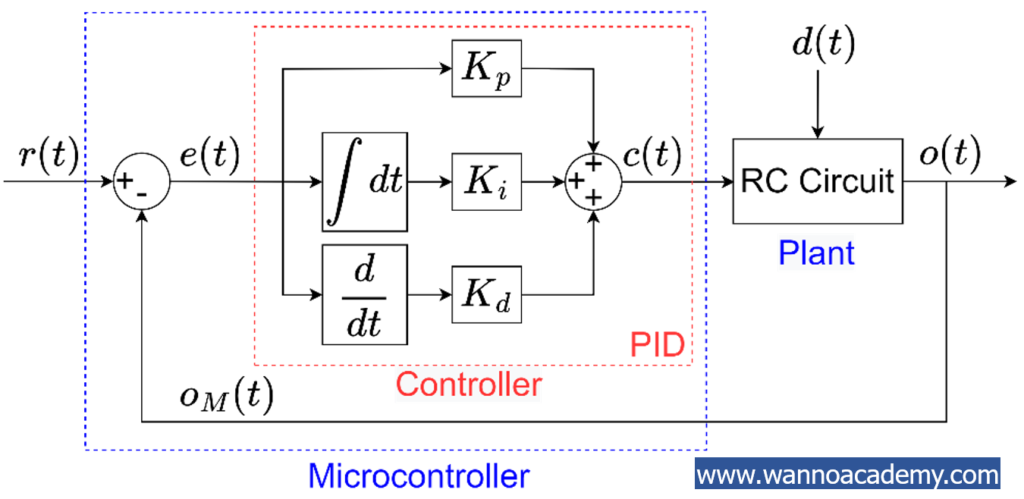
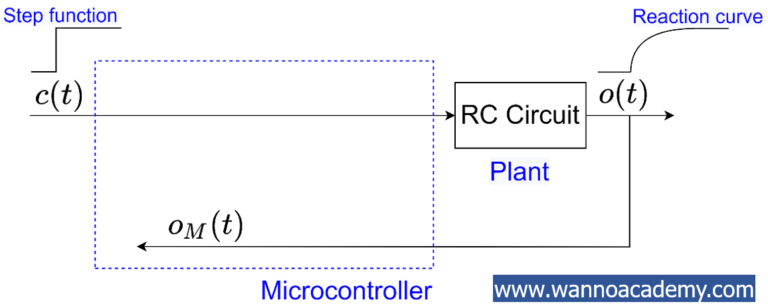
การเชื่อมต่อบอร์ดไมโครคอนโทรลเลอร์เข้ากับวงจร RC
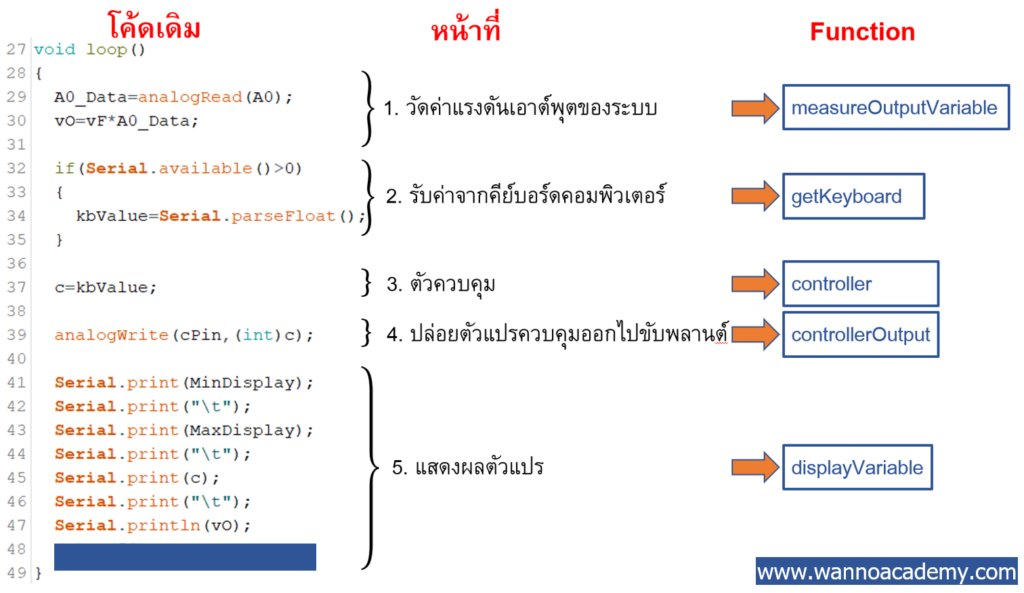
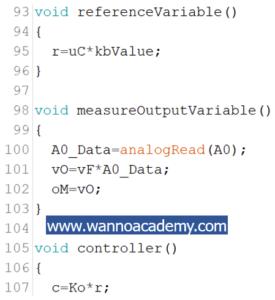
ขั้นตอนการถ่ายโอนการเขียนโปรแกรมแบบธรรมดาไปเป็นแบบ Function
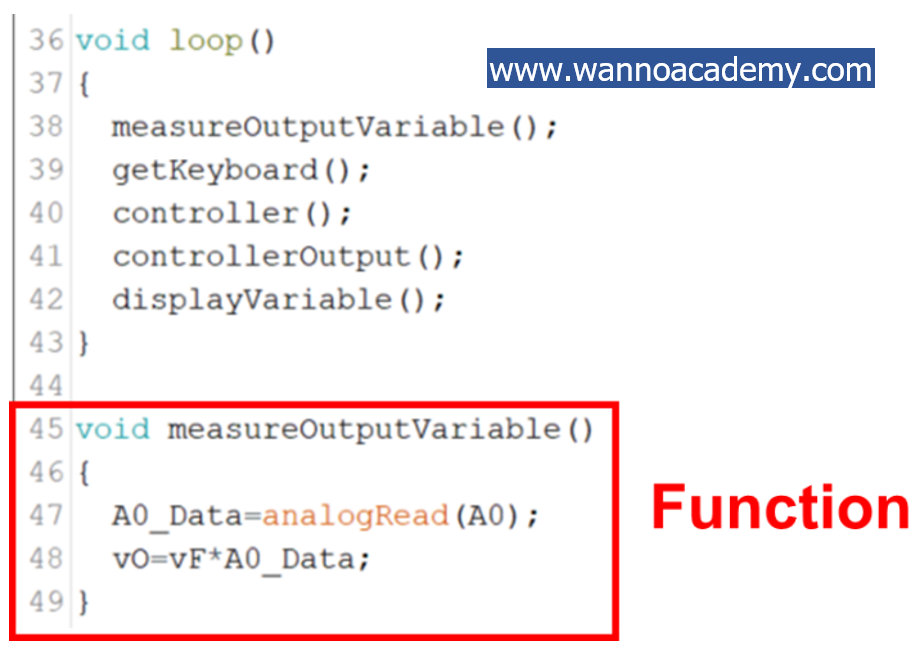
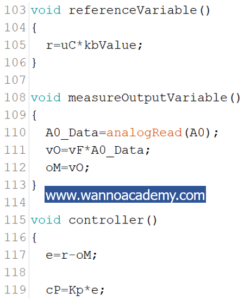
การเขียนโปรแกรมแบบใช้ Function
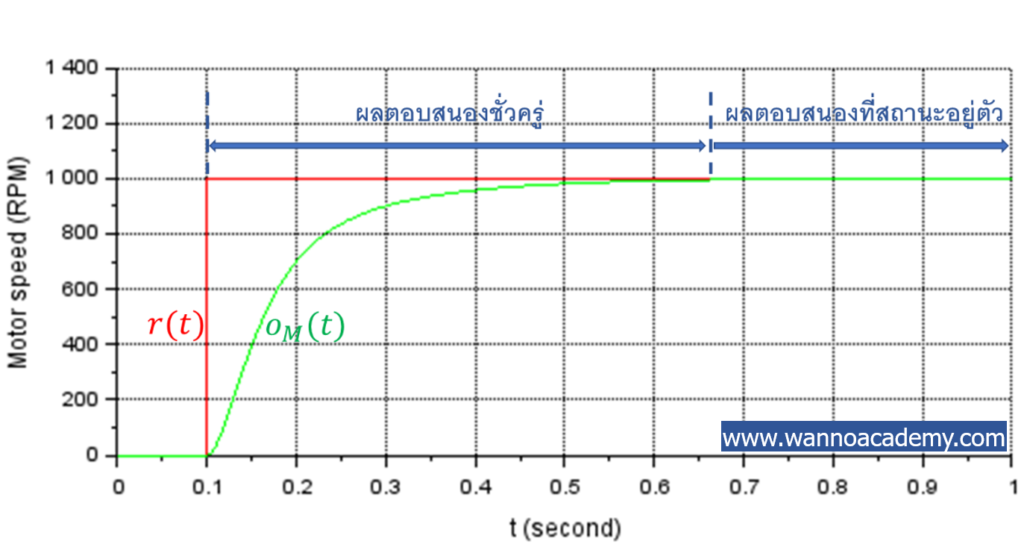
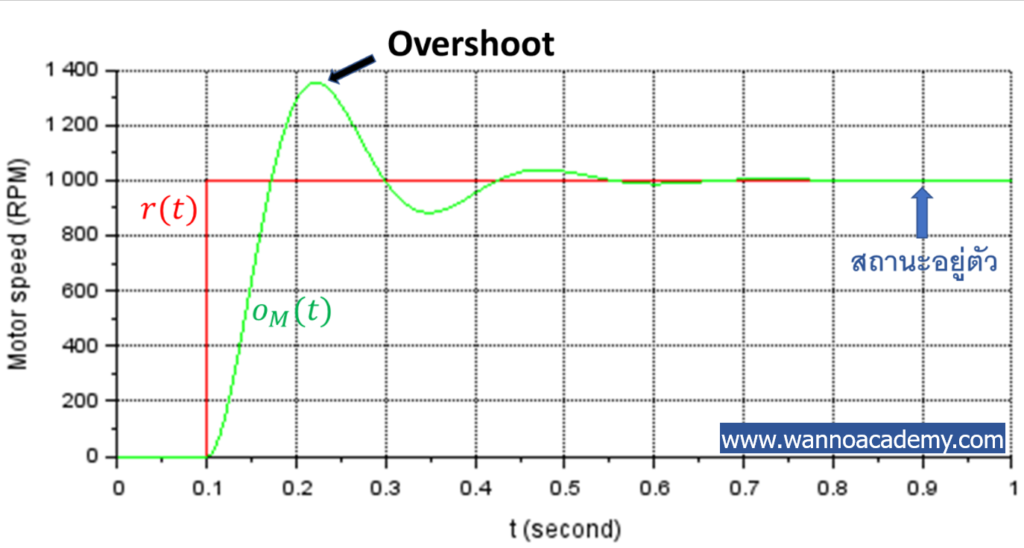
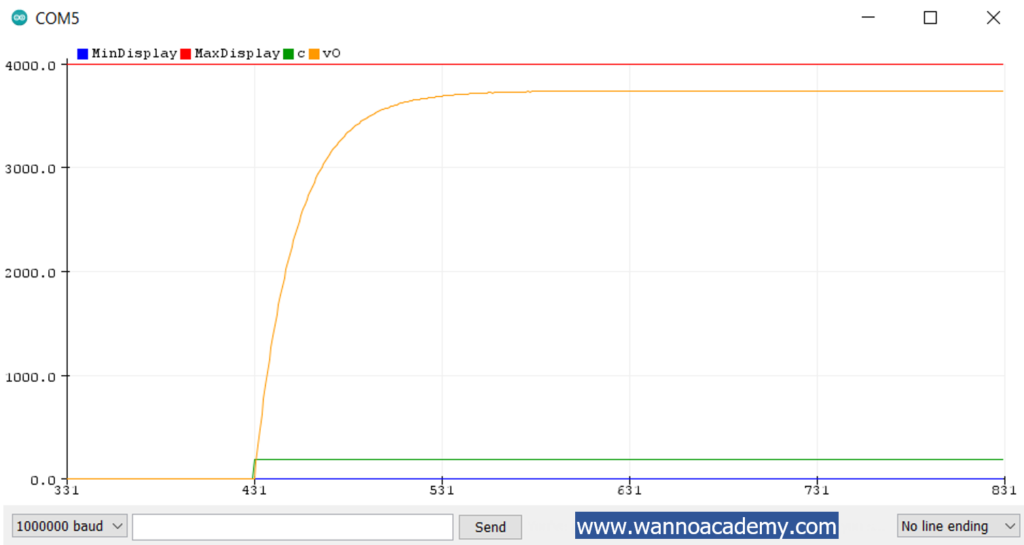
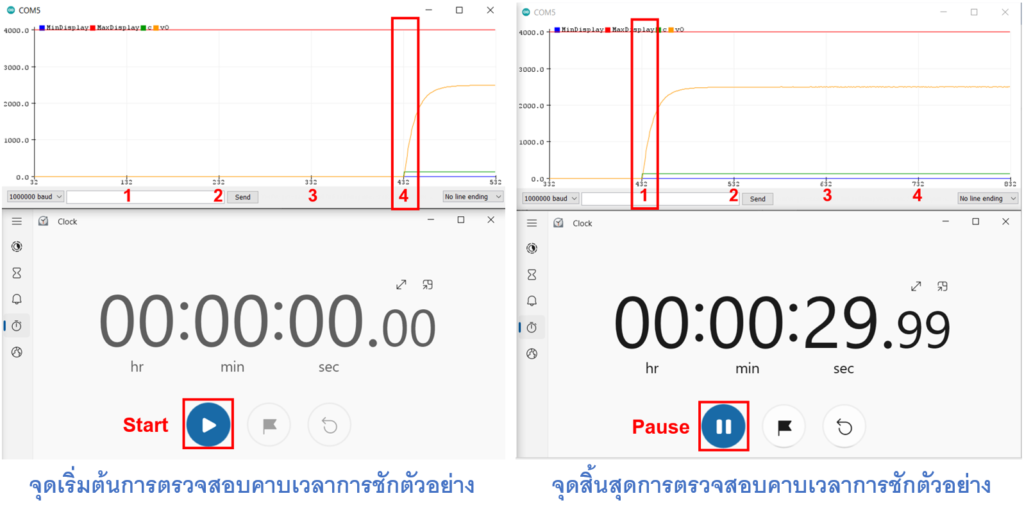
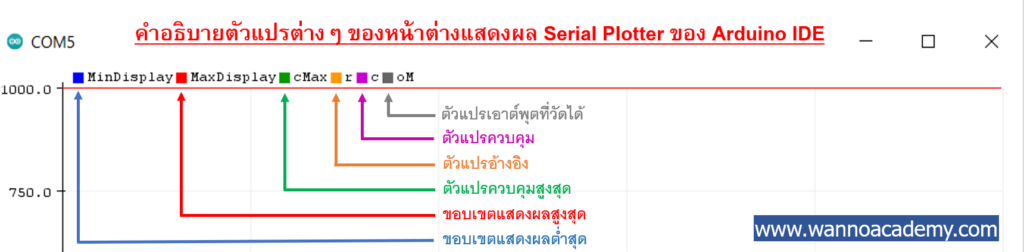
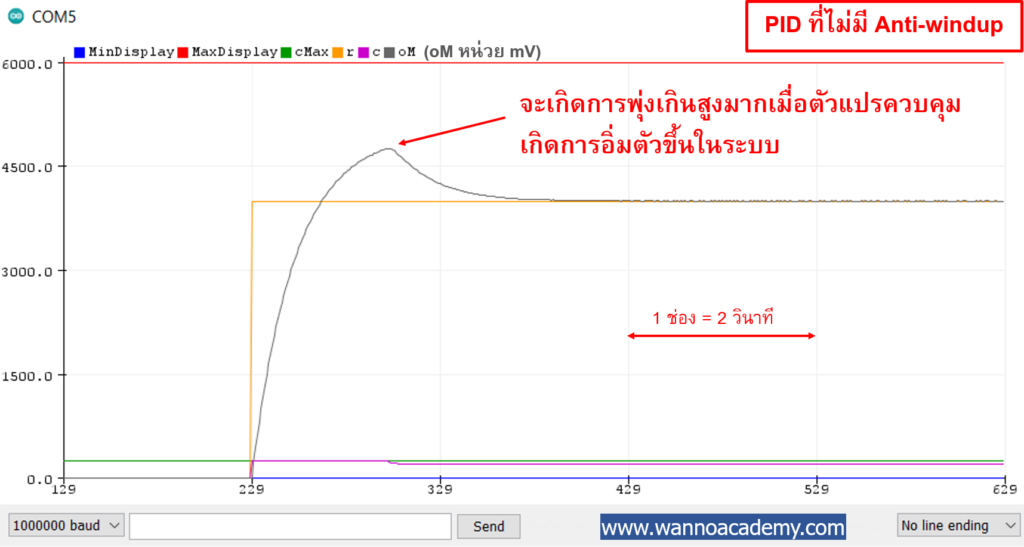
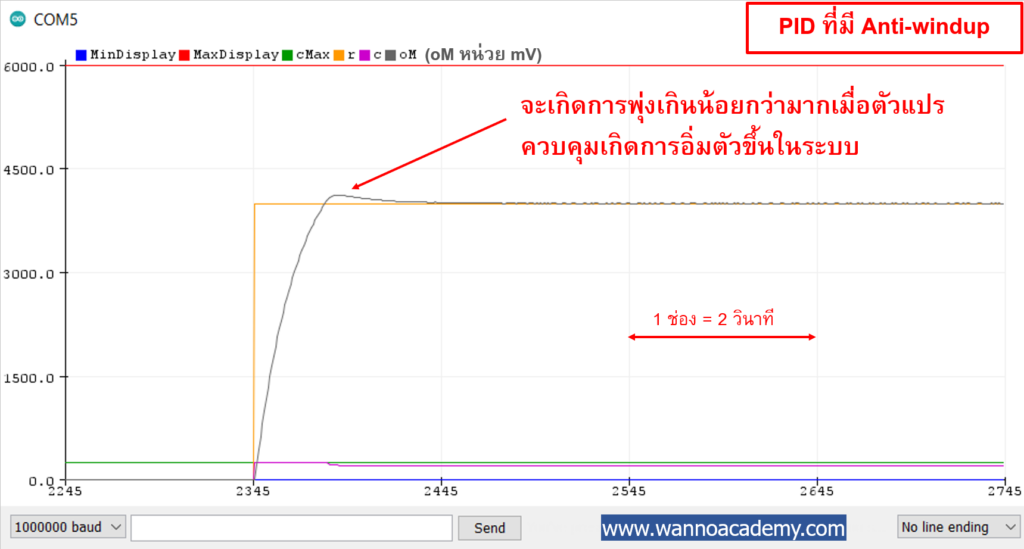
การแสดงผลตัวแปรต่างๆ ของระบบควบคุมด้วย Serial Plotter
จากรูปเป็นการตรวจสอบว่าวงรอบการชักตัวอย่างสัญญาณมีค่าถูกต้องและคงที่ตามที่ได้กำหนดไว้ในโปรแกรมหรือไม่ โดยการตรวจสอบจะใช้ตัวจับเวลาของ Microsoft Windows ในการตรวจสอบ ซึ่งรายละเอียดในการตรวจสอบจะถูกอธิบายอย่างละเอียดภายในคอร์สเรียน