บทนี้จะเป็นการสอนการใช้งานบอร์ดไมโครคอนโทรลเลอร์รุ่น UNO ร่วมกับโปรแกรม Arduino IDE เพื่อวัดแล้วแสดงผลสัญญาณและส่งค่าออกจากไมโครคอนโทรลเลอร์เพื่อควบคุมระบบ
ส่วนหนึ่งจากเนื้อหาในบทนี้
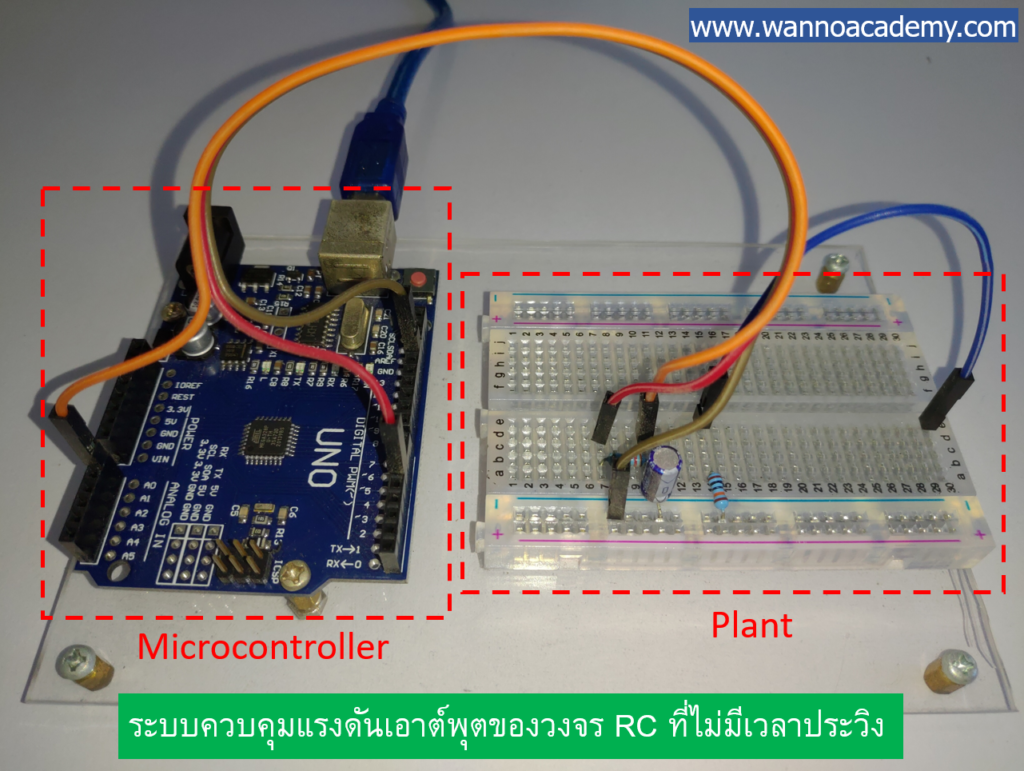
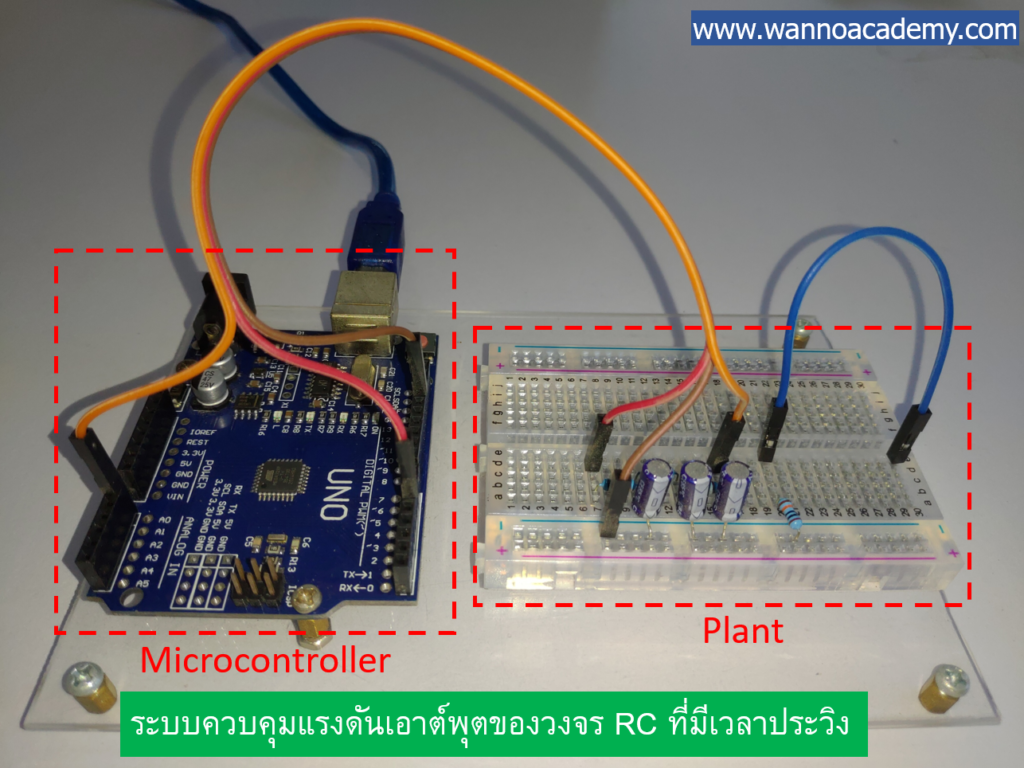
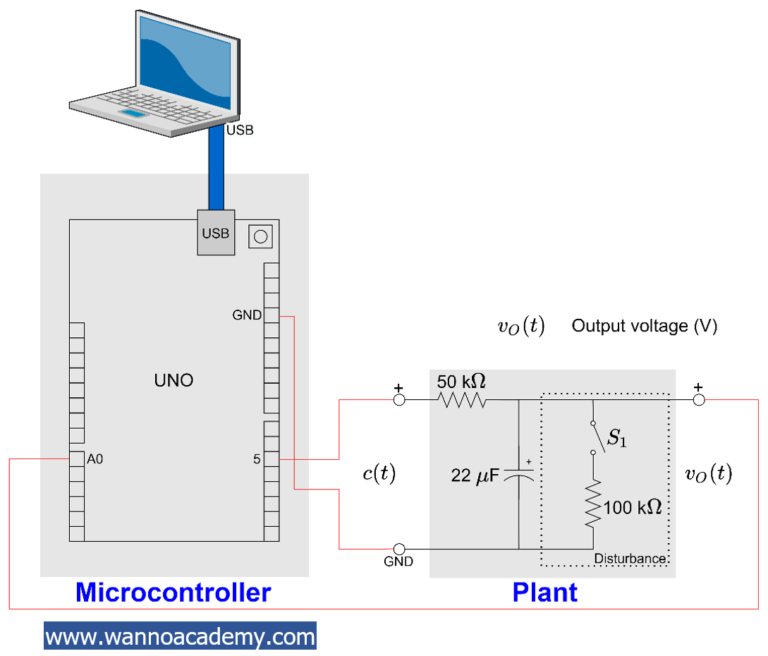
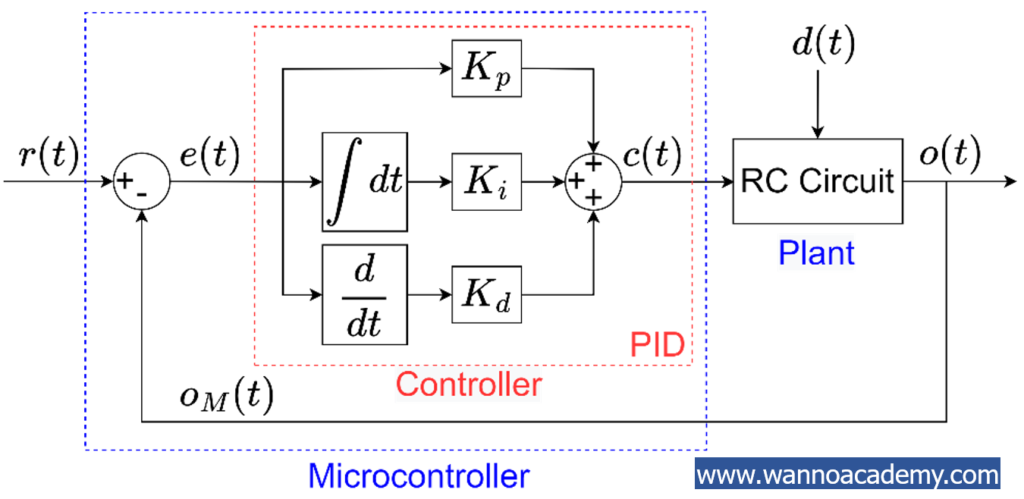
การเชื่อมต่อบอร์ดไมโครคอนโทรลเลอร์เข้ากับวงจร RC
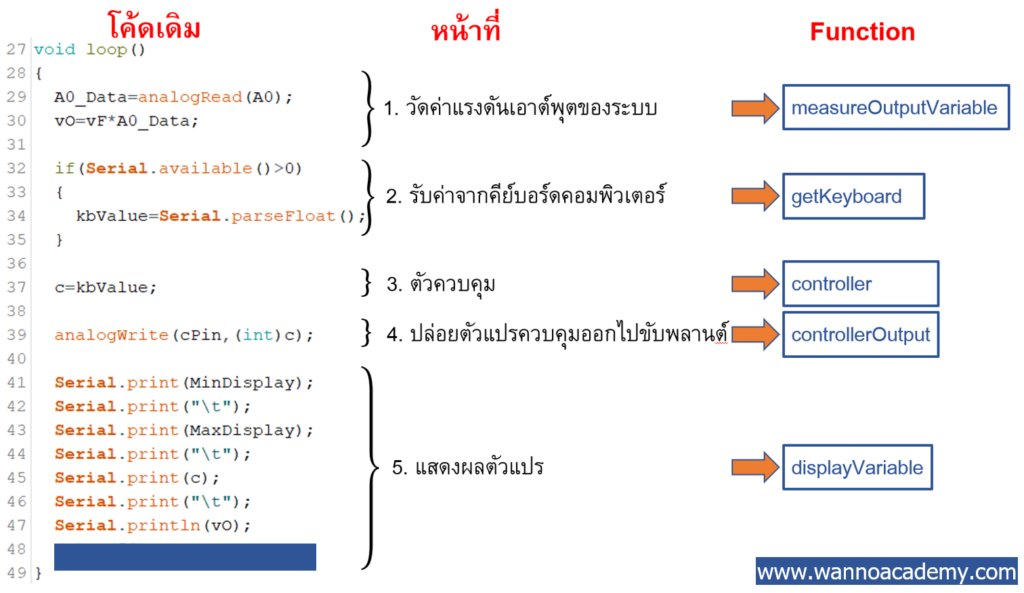
ขั้นตอนการถ่ายโอนการเขียนโปรแกรมแบบธรรมดาไปเป็นแบบ Function
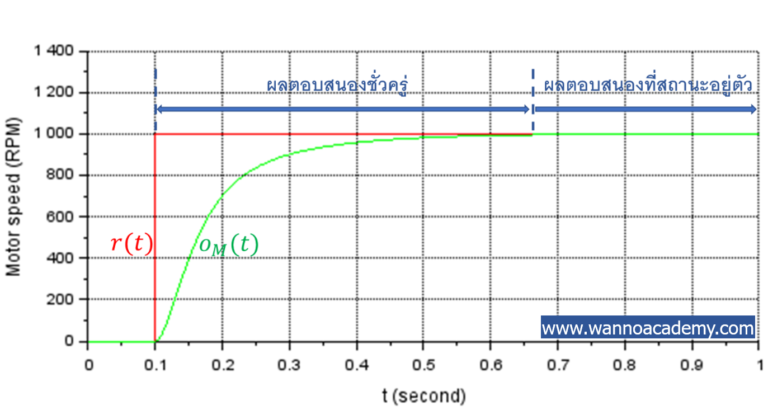
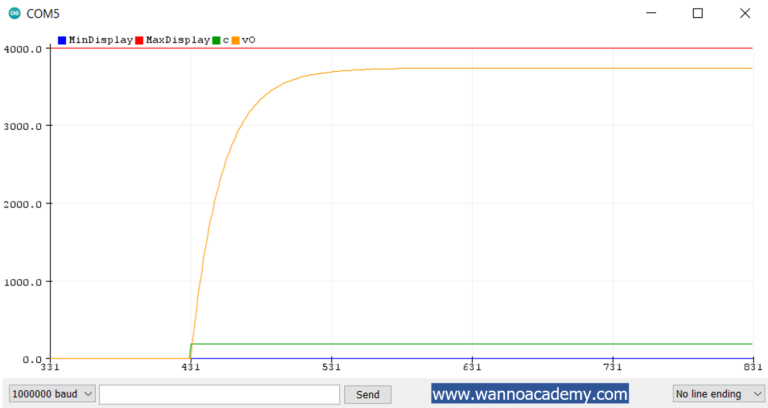
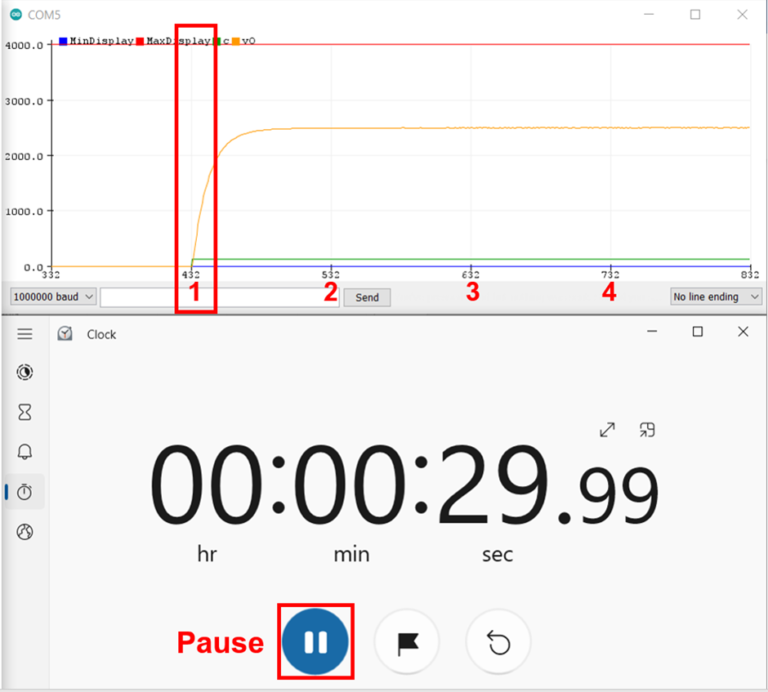
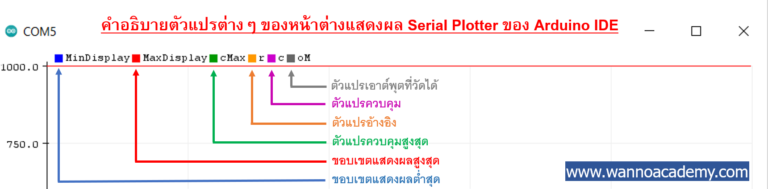
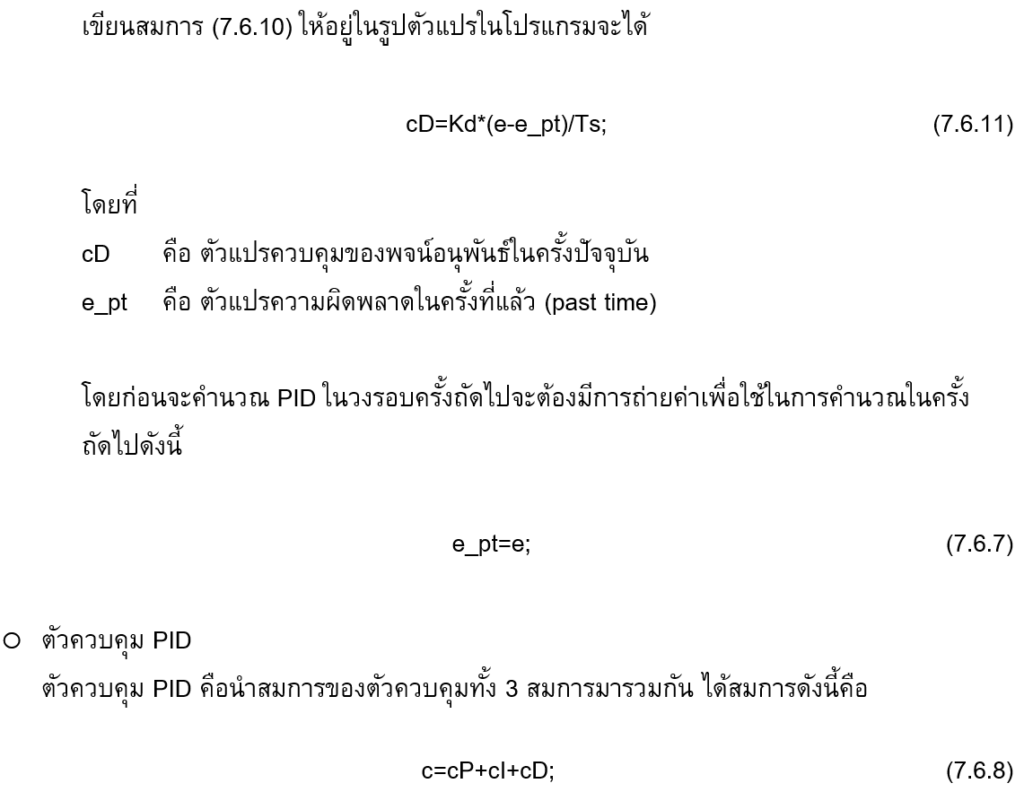
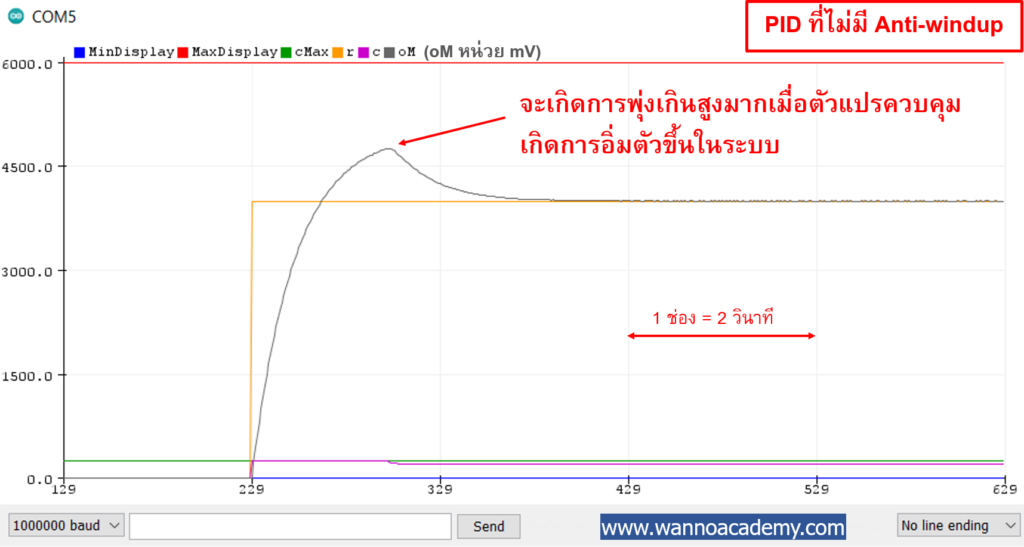
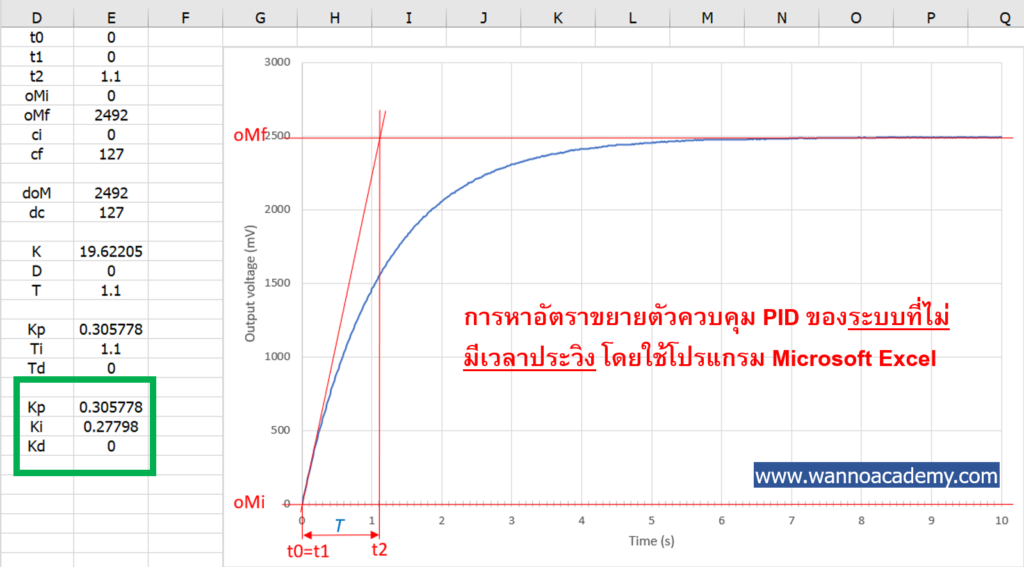
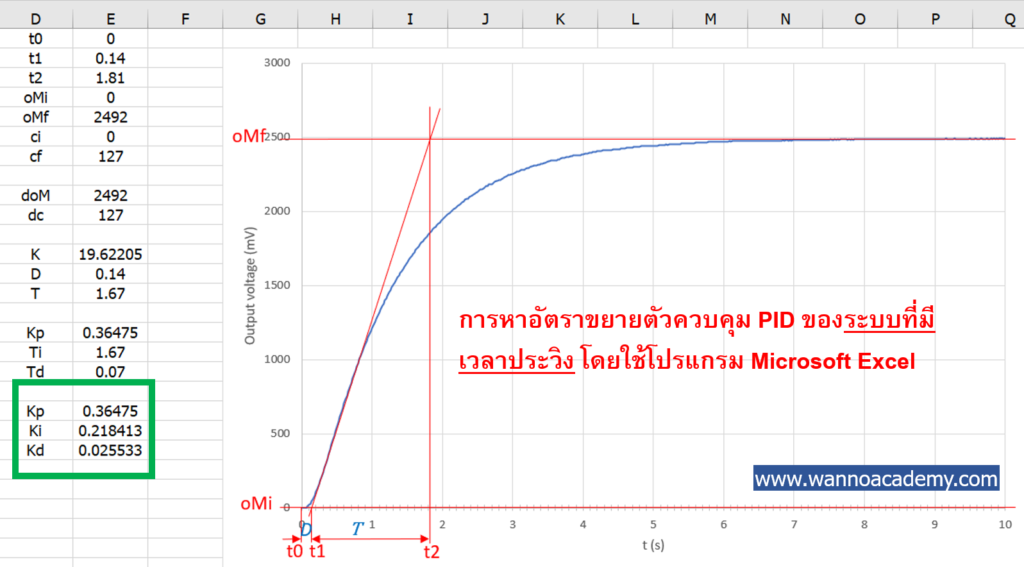
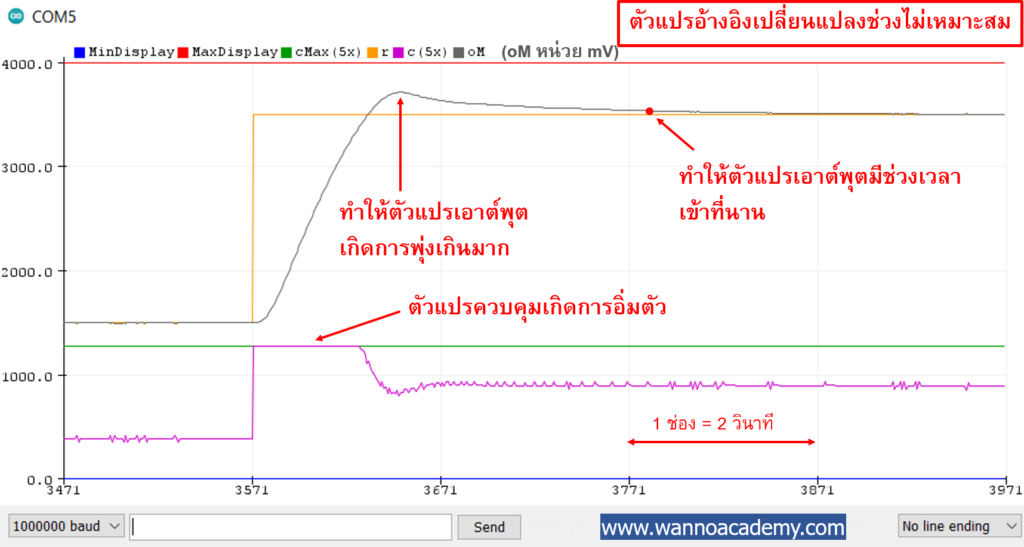
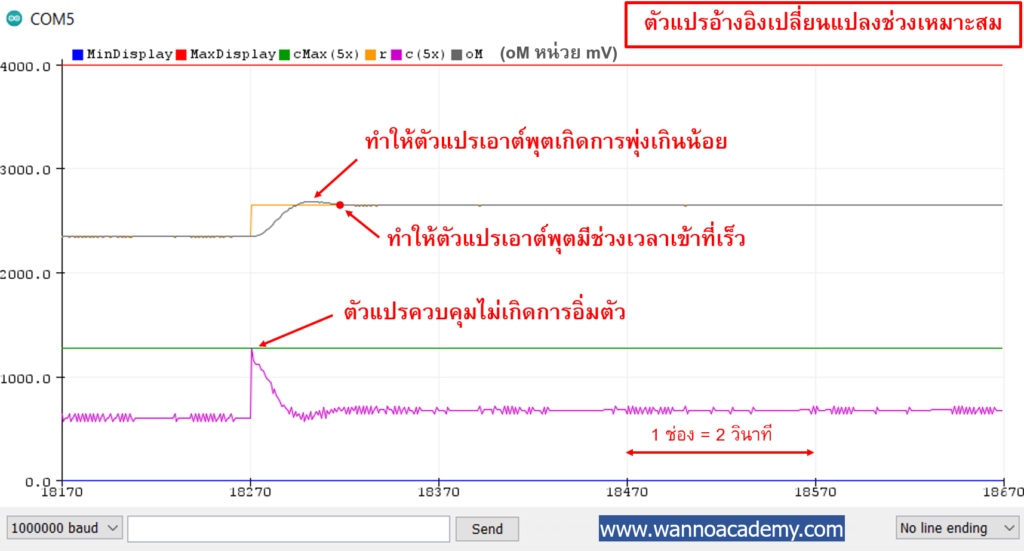
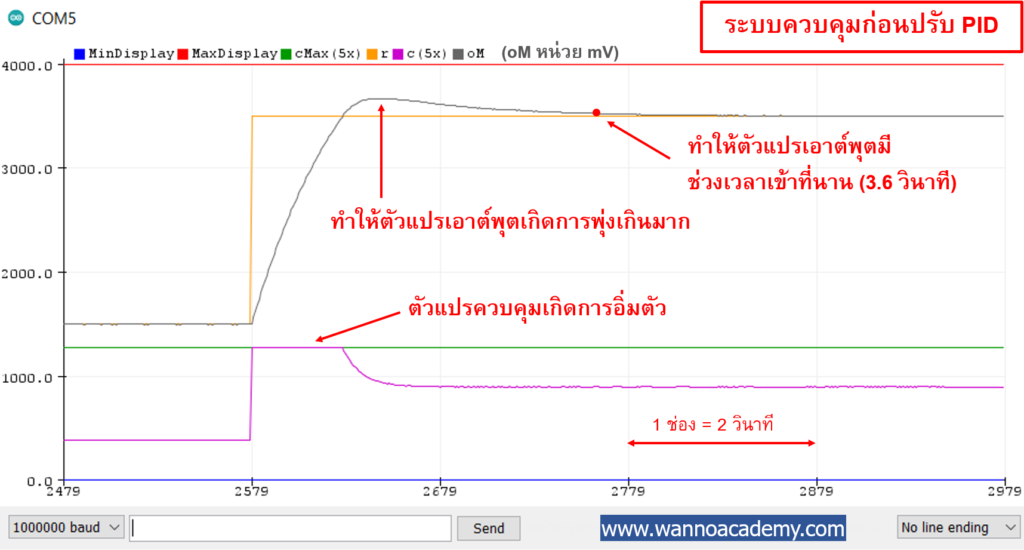
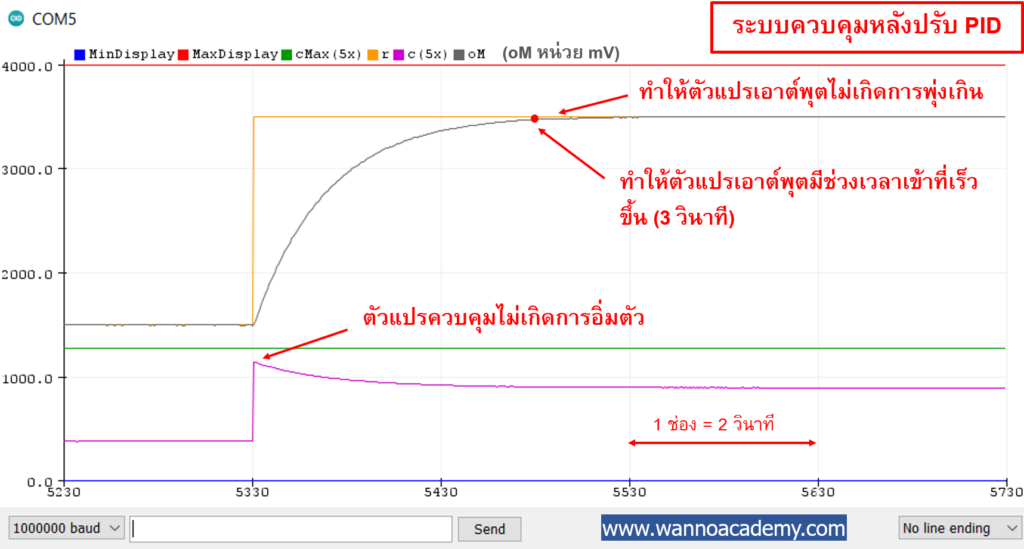
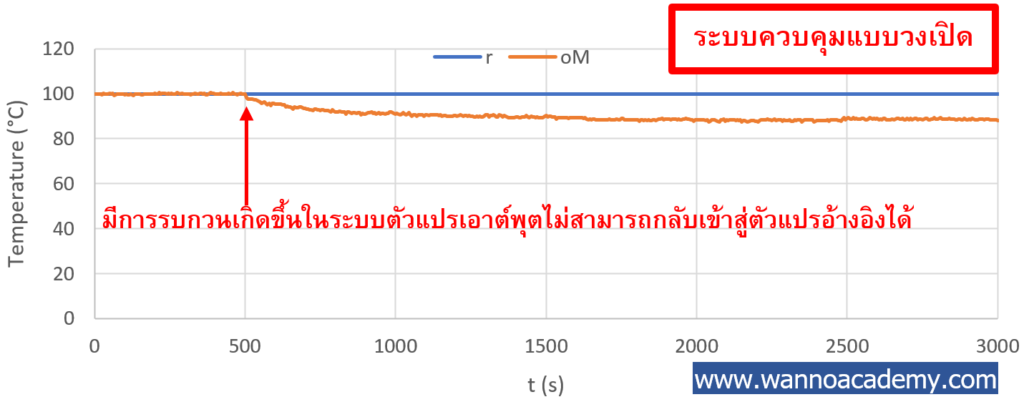
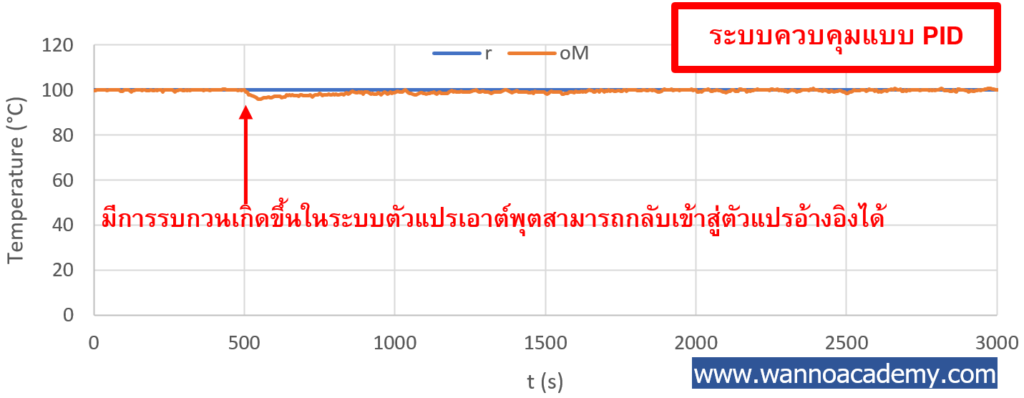
การแสดงผลตัวแปรต่างๆ ของระบบควบคุมด้วย Serial Plotter