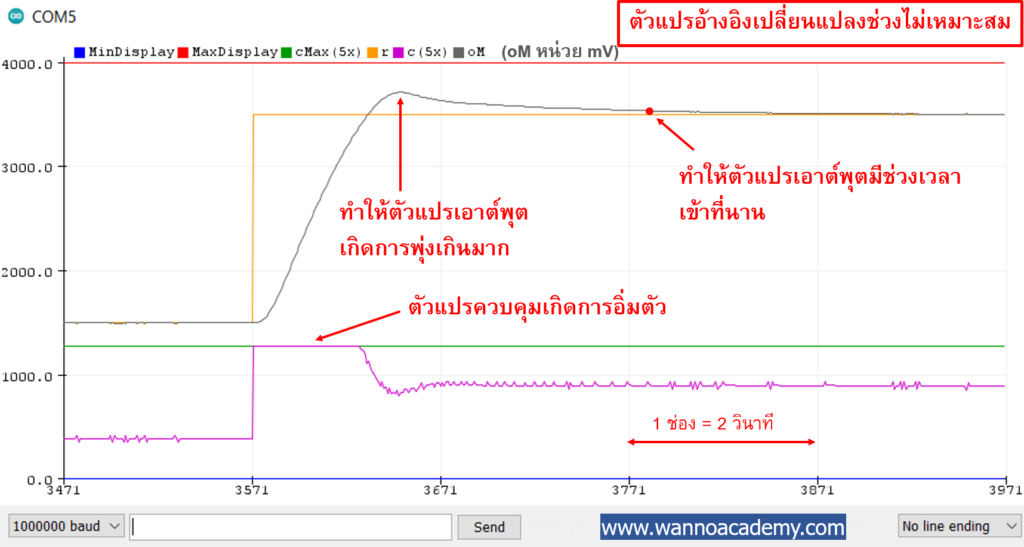
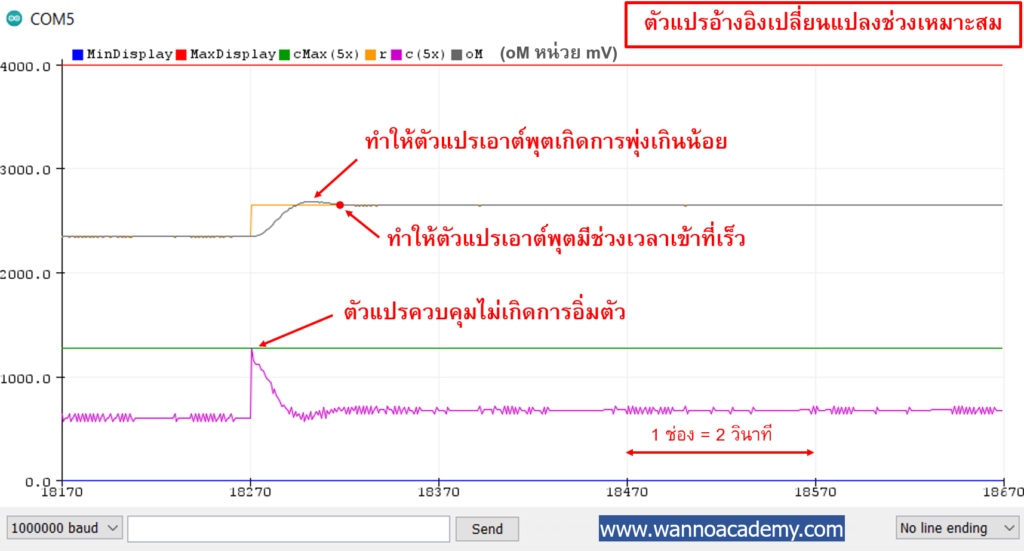
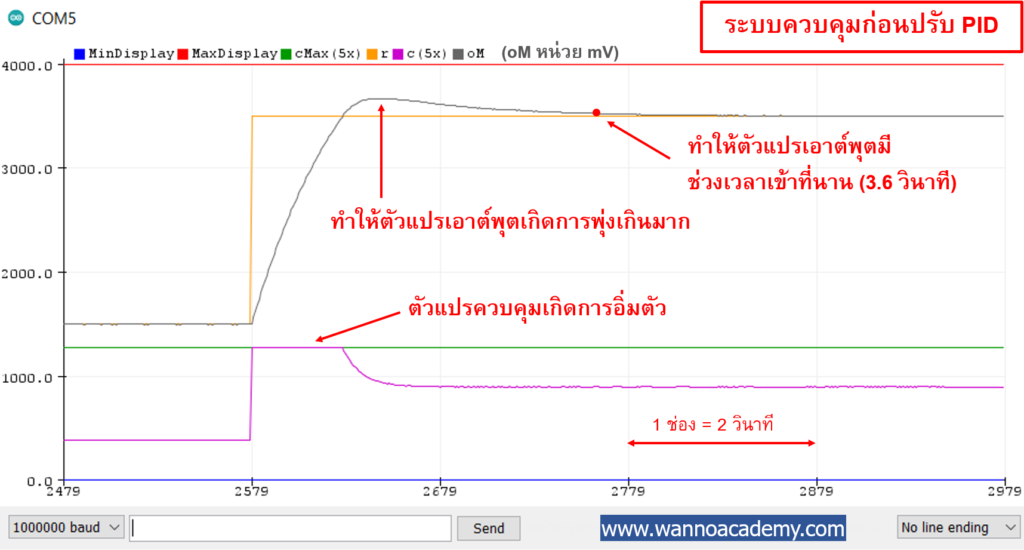
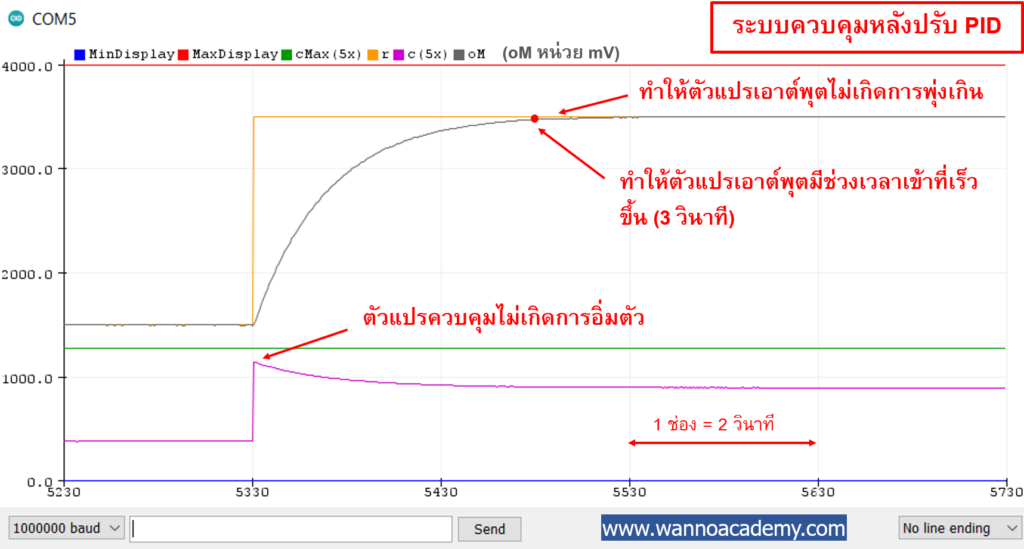
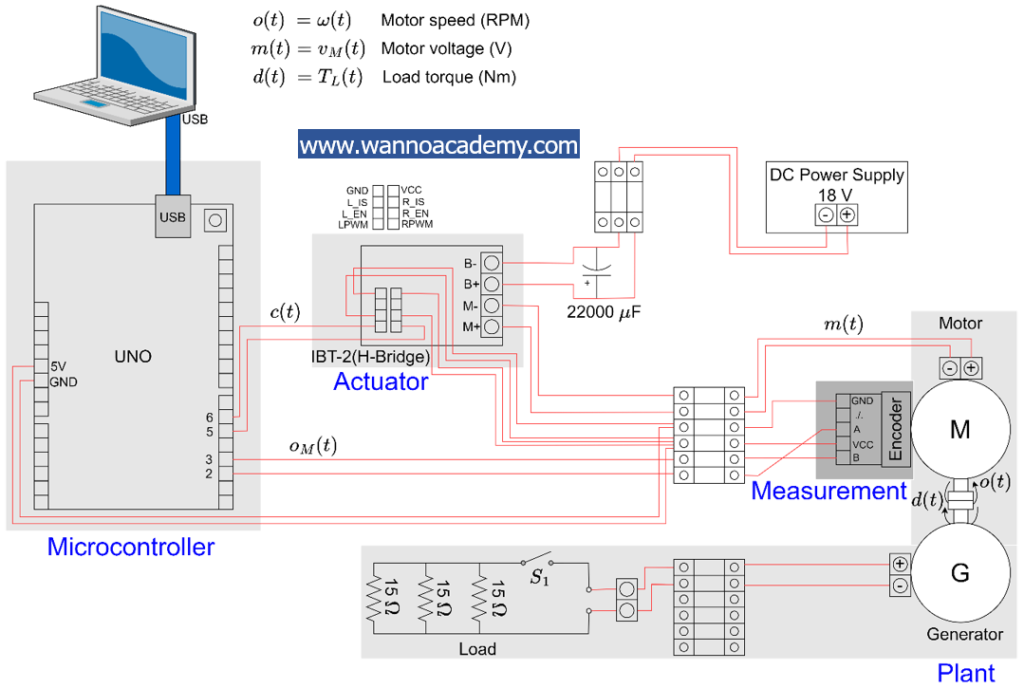
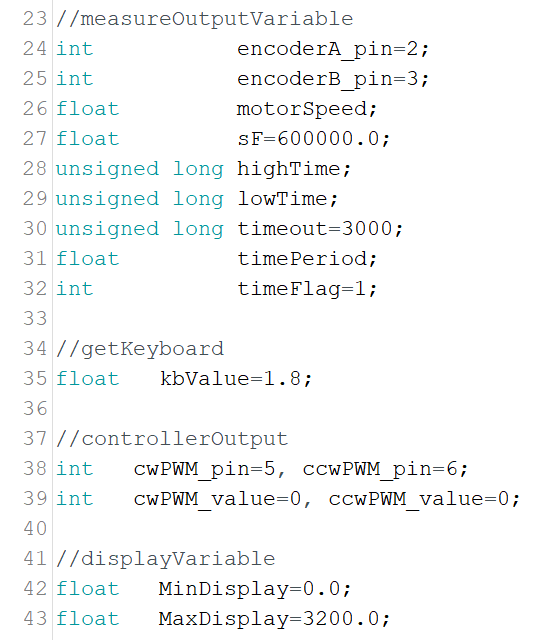
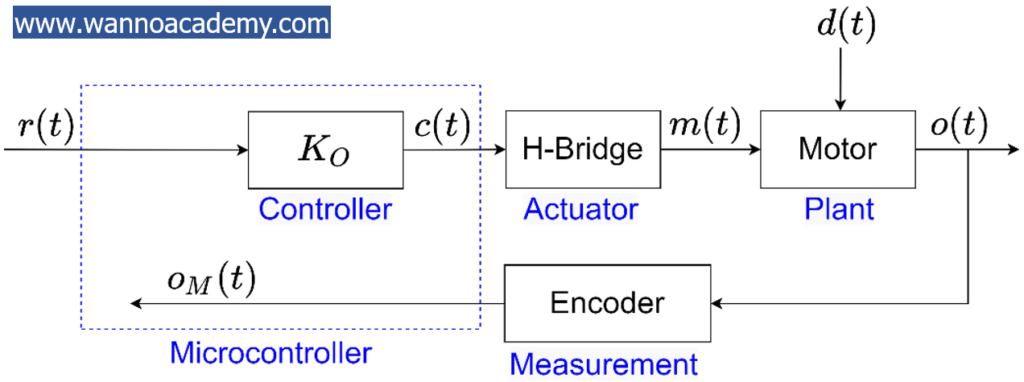
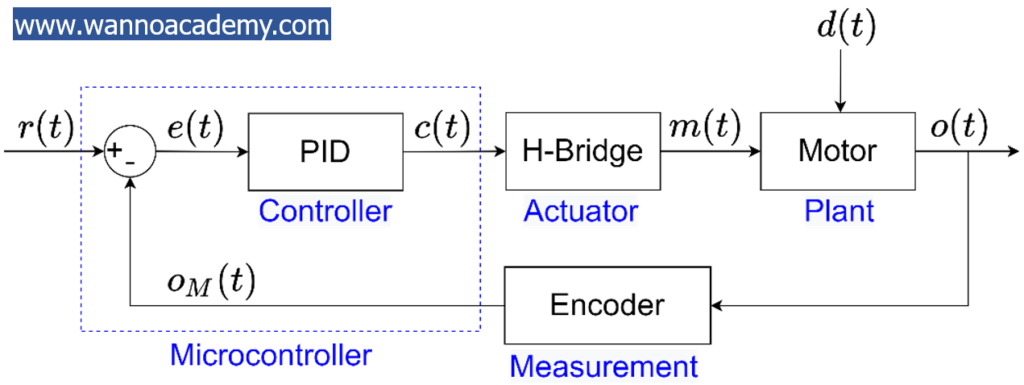
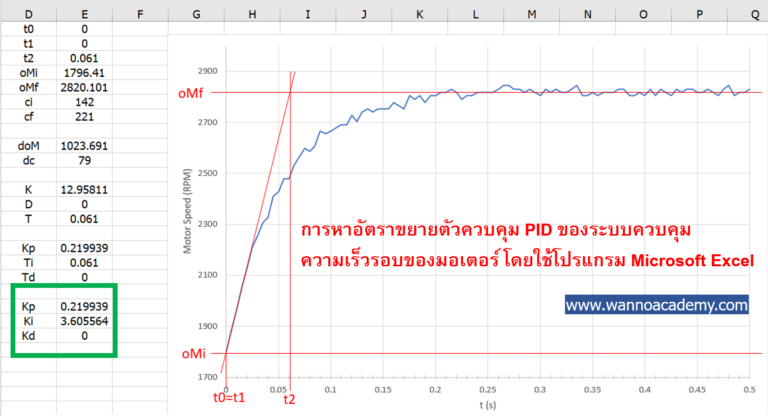
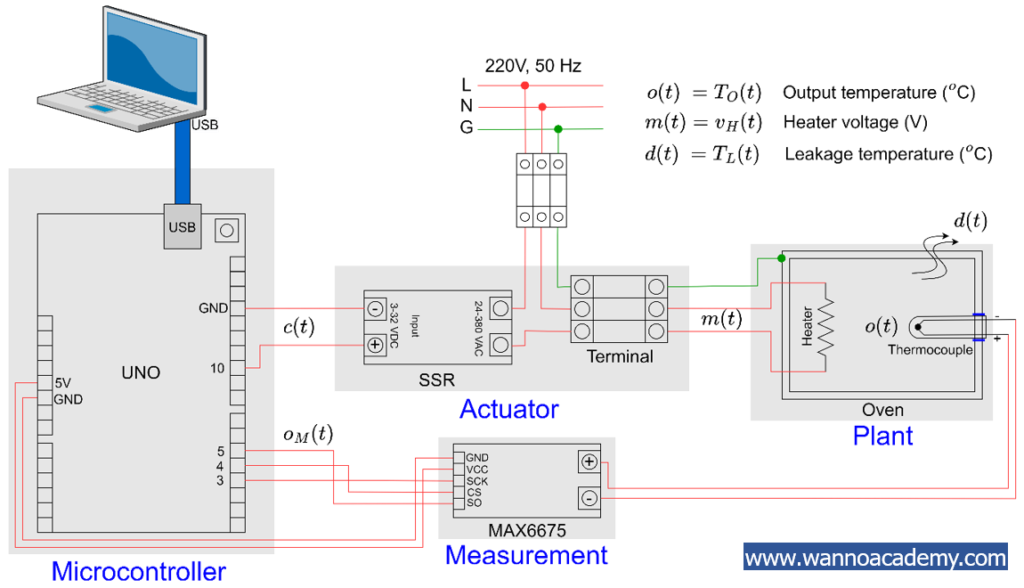
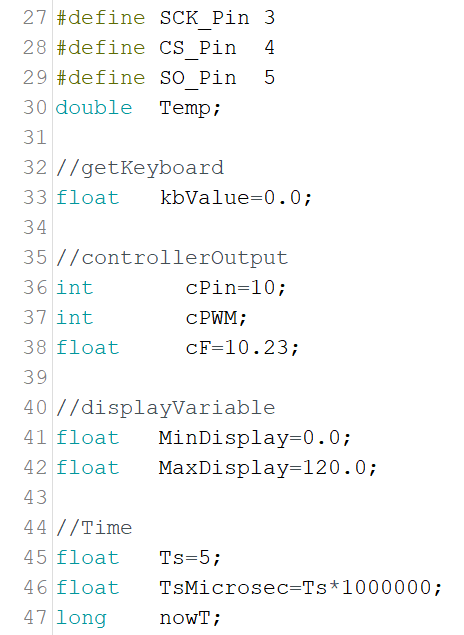
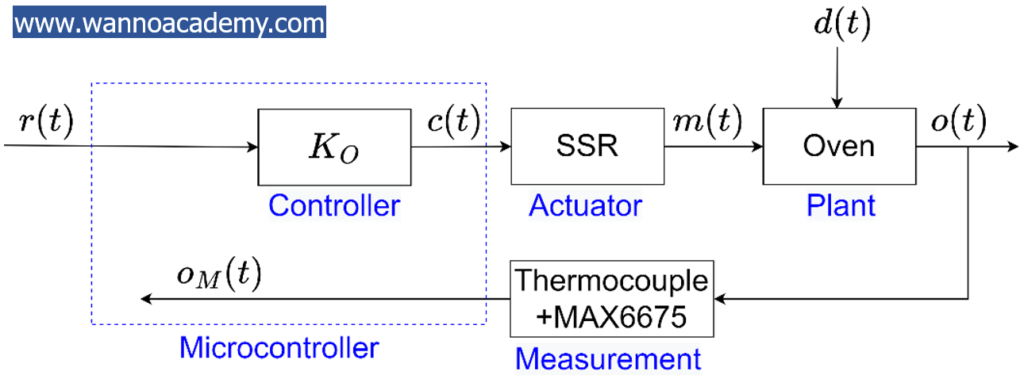
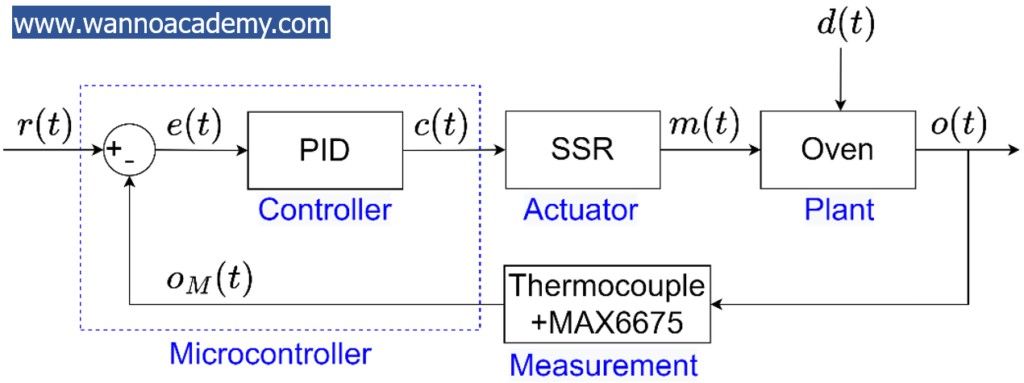
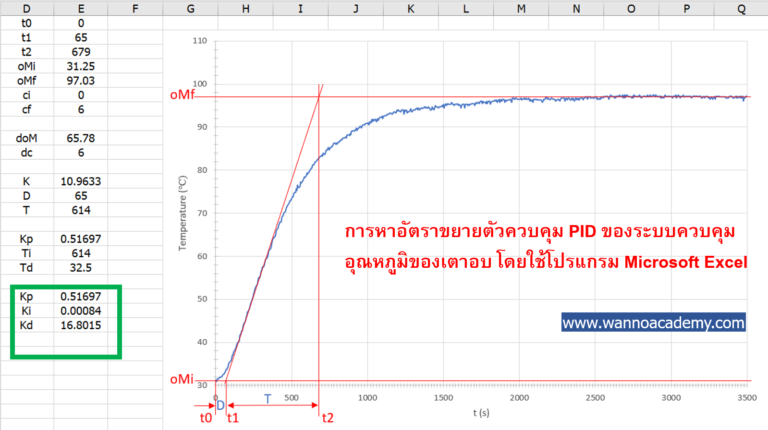
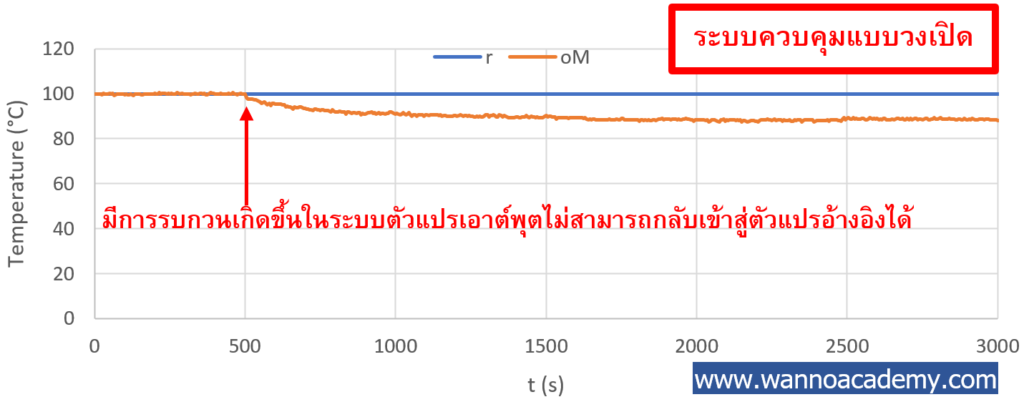
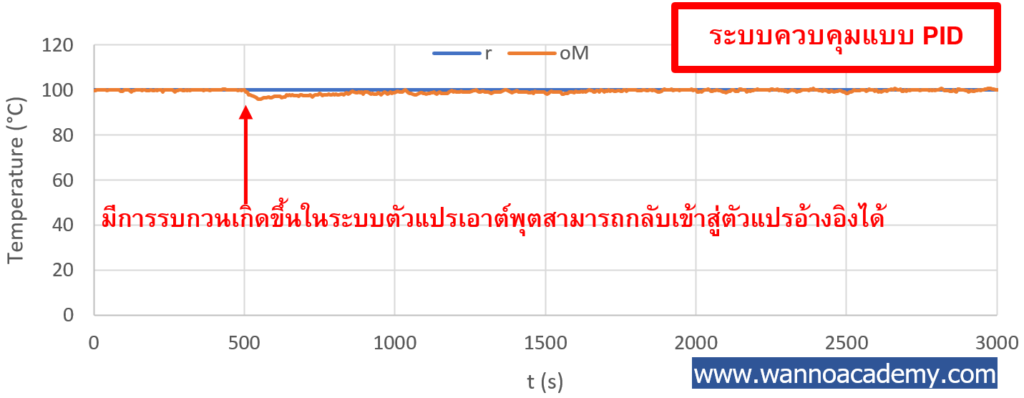
ประกาศ! คอร์สนี้ได้ยุติการขายแล้วครับ คอร์สตัวควบคุม PID ขั้นพื้นฐาน Part 2: ปัญหาที่อาจเกิดขึ้นและการประยุกต์ใช้งานตัวควบคุม PID โดยเนื้อหาและตัวอย่างผลการทดลองที่อยู่ภายใน Part 2 มีดังนี้คือ บทที่ 10 การอิ่มตัวของตัวแปรควบคุมการอิ่มตัว (Saturation) คือสภาวะเมื่อสิ่งหนึ่งสิ่งใดที่เอาต์พุตของมันไม่สามารถเพิ่มขึ้นหรือลดลงได้อีกถึงแม้ว่าอินพุตของมันจะมีค่าเพิ่มมากขึ้นหรือมีค่าน้อยลงก็ตามในบทนี้จะชี้ให้เห็นผลซึ่งเป็นปัญหาจากการอิ่มตัวของตัวแปรควบคุมที่เกิดขึ้นได้ในระบบควบคุม เพื่อให้ผู้เรียนหรือผู้ใช้งานได้ทราบการมีอยู่ของปัญหา เพื่อที่จะได้หลีกเลี่ยงหรือแก้ไขเพื่อให้ได้ผลตอบสนองที่ดีขึ้นกว่าเดิมส่วนหนึ่งของผลการทดลองในบทนี้ การหลีกเลี่ยงการอิ่มตัวของตัวแปรควบคุมด้วยการเลือกช่วงการเปลี่ยนแปลงของตัวแปรอ้างอิงที่เหมาะสมกับระบบ การเปรียบเทียบผลตอบสนองของระบบเมื่อตัวแปรอ้างอิงมีช่วงการเปลี่ยนแปลงที่แตกต่างกันในระบบวงจร RC แบบมีเวลาประวิง การแก้ไขการอิ่มตัวของตัวแปรควบคุมด้วยการปรับค่าอัตราขยายของ PID ให้เหมาะสมกับระบบ การเปรียบเทียบผลตอบสนองของระบบก่อนและหลังการปรับอัตราขยาย PID ในระบบวงจร RC แบบไม่มีเวลาประวิง บทที่ 11 การควบคุมความเร็วรอบมอเตอร์ไฟฟ้ากระแสตรงบทนี้จะเป็นการแสดงให้เห็นถึงการนำเอาความรู้และโปรแกรมต่างๆ จากบทที่ 2 ถึงบทที่ 10 ซึ่งใช้กับระบบควบคุมแรงดันเอาต์พุตของวงจร RC แบบไม่มีเวลาประวิง มาประยุกต์ใช้งานในระบบจริงซึ่งในบทนี้คือระบบควบคุมความเร็วรอบมอเตอร์กระแสตรง ส่วนหนึ่งของเนื้อหาในบทนี้ วงจรไฟฟ้าของระบบควบคุมความเร็วรอบของมอเตอร์กระแสตรง ตัวอย่างบางส่วนของโปรแกรมระบบควบคุมความเร็วรอบของมอเตอร์ บล็อกไดอะแกรมการควบคุมแบบวงเปิดของระบบควบคุมความเร็วรอบของมอเตอร์กระแสตรง บล็อกไดอะแกรมการควบคุมแบบ PID ของระบบควบคุมความเร็วรอบของมอเตอร์กระแสตรง การหาอัตราขยายตัวควบคุม PID ของระบบควบคุมความเร็วรอบของมอเตอร์ การติดตามการเปลี่ยนแปลงตัวแปรอ้างอิง การกำจัดการรบกวนที่เกิดขึ้นในระบบควบคุม บทที่ 12 การควบคุมอุณหภูมิของเตาอบบทนี้จะเป็นการแสดงให้เห็นถึงการนำเอาความรู้และโปรแกรมต่างๆ จากบทที่ 2 ถึงบทที่ 10 ซึ่งใช้กับระบบควบคุมแรงดันเอาต์พุตของวงจร RC แบบมีเวลาประวิง มาประยุกต์ใช้งานในระบบจริงซึ่งในบทนี้คือระบบควบคุมอุณหภูมิของเตาอบ วงจรไฟฟ้าของระบบควบคุมอุณหภูมิของเตาอบ ตัวอย่างบางส่วนของโปรแกรมระบบควบคุมอุณหภูมิของเตาอบ บล็อกไดอะแกรมการควบคุมแบบวงเปิดของระบบควบคุมอุณหภูมิของเตาอบ บล็อกไดอะแกรมการควบคุมแบบ PID ของระบบควบคุมอุณหภูมิของเตาอบ การหาอัตราขยายตัวควบคุม PID ของระบบควบคุมอุณหภูมิของเตาอบ การติดตามการเปลี่ยนแปลงตัวแปรอ้างอิง การกำจัดการรบกวนที่เกิดขึ้นในระบบควบคุม สิ่งที่ท่านจะได้รับจาก Part 2 1. วีดีโอความยาวมากกว่า 20 ชั่วโมง โดยจะส่งเป็น Flash Drive (Flash Drive ขนาด 32 GB) ไปให้ผู้เรียนเก็บไว้เป็นของท่าน2. จำนวนชั่วโมงในการสอน การตอบคำถาม ผ่านทาง VDO ออนไลน์แบบตัวต่อตัวกับผู้สอน จำนวน 2 ชั่วโมง โดยที่ผู้เรียนสามารถเลือกจองวันและเวลาเรียนตามที่ผู้เรียนสะดวกได้ที่เพจ Facebook: Wanno Academy และผู้เรียนสามารถชื้อจำนวนชั่วโมงเพิ่มเติมได้ตามต้องการ (ชั่วโมงละ 300 บาท)3. ซอร์สโค๊ดที่ใช้ในการทดลองทั้งหมดของ Part 24. ไฟล์ของโปรแกรม Microsoft Excel ที่ใช้ในการคำนวณหาค่าอัตราขยายของตัวควบคุม PID ราคาคอร์สตัวควบคุม PID ขั้นพื้นฐาน Part 2 ราคาคอร์สราคา 5,000 บาท เมื่อชื้อทั้ง Part 1 และ Part 2 พร้อมกัน สิ่งที่ท่านจะได้รับ 1. วีดีโอความยาวมากกว่า 42 ชั่วโมง โดยจะส่งเป็น Flash Drive (Flash Drive ขนาด 64 GB) ไปให้ผู้เรียนเก็บไว้เป็นของท่าน2. จำนวนชั่วโมงในการสอน การตอบคำถาม ผ่านทาง VDO ออนไลน์แบบตัวต่อตัวกับผู้สอน จำนวน 4 ชั่วโมง โดยที่ผู้เรียนสามารถเลือกจองวันและเวลาเรียนตามที่ผู้เรียนสะดวกได้ที่เพจ Facebook: Wanno Academy และผู้เรียนสามารถชื้อจำนวนชั่วโมงเพิ่มเติมได้ตามต้องการ (ชั่วโมงละ 300 บาท)3. ซอร์สโค๊ดที่ใช้ในการทดลองทั้งหมดของคอร์สนี้4. ไฟล์ของโปรแกรม Microsoft Excel ที่ใช้ในการคำนวณหาค่าอัตราขยายของตัวควบคุม PID ราคาคอร์สตัวควบคุม PID ขั้นพื้นฐาน เมื่อชื้อทั้ง Part 1 และ Part 2 พร้อมกัน ราคาคอร์สราคา 9,500 บาทหมายเหตุ: หากชื้อแยก Part 1 และ Part 2, ราคา Part 1 เท่ากับ 5,500 บาท, ราคา Part 2 เท่ากับ 5,000 บาท, ดังนั้นราคา Part 1+Part2=10,500 บาทซึ่งหากชื้อ Part 1 และ Part 2 พร้อมกัน ราคาจะถูกกว่า 1,000 บาท หมายเหตุ: ก่อนจะตัดสินใจชื้อคอร์ส พูดคุยกับ Wanno Academy กันก่อนครับ เพื่อที่ท่านจะได้รู้ว่าเนื้อหาภายในคอร์สนี้ตรงตามที่ท่านต้องการหรือไม่ โดยกดปุ่มด้านล่างนี้ได้เลยครับ “จะดีกว่าไหมครับ ที่ท่านจะได้นำ PID ที่มีประสิทธิภาพไปใช้งาน นับตั้งแต่ตอนนี้ และได้ใช้งานไปตลอดชีวิตการทำงานของท่าน?” พูดคุยกับ Wanno Academy ก่อนจะตัดสินใจชื้อคอร์สนี้ กดปุ่มนี้ได้เลยครับ Facebook: Wanno Academy (เมื่อเข้า Wanno Acedemy ได้แล้ว กดส่งข้อความ เพื่อพูดคุย สอบถามข้อมูลเพิ่มเติมหรือชื้อคอร์สนี้ได้เลยครับ) หรือสามารถส่ง Email มาได้ที่wanno.acad@gmail.com