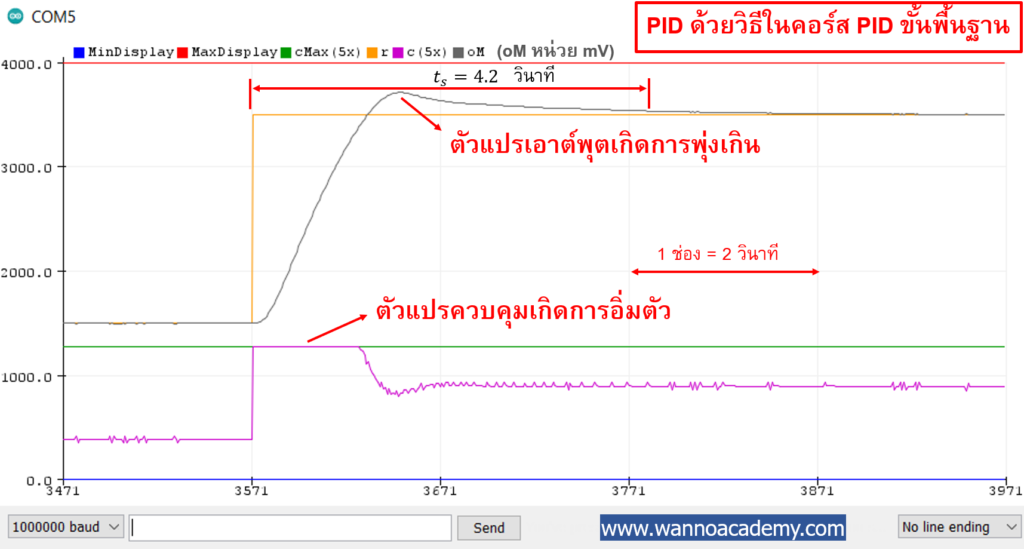
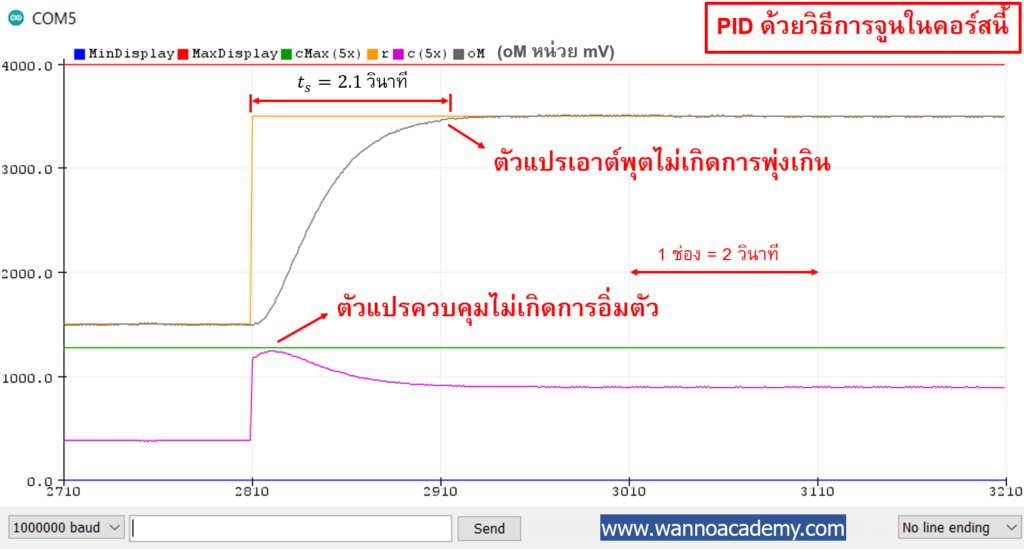
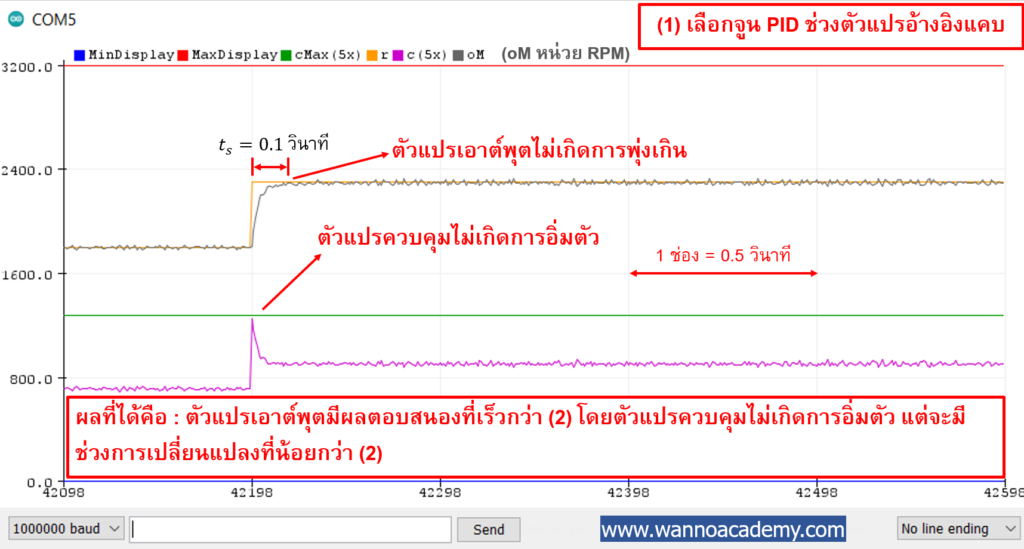
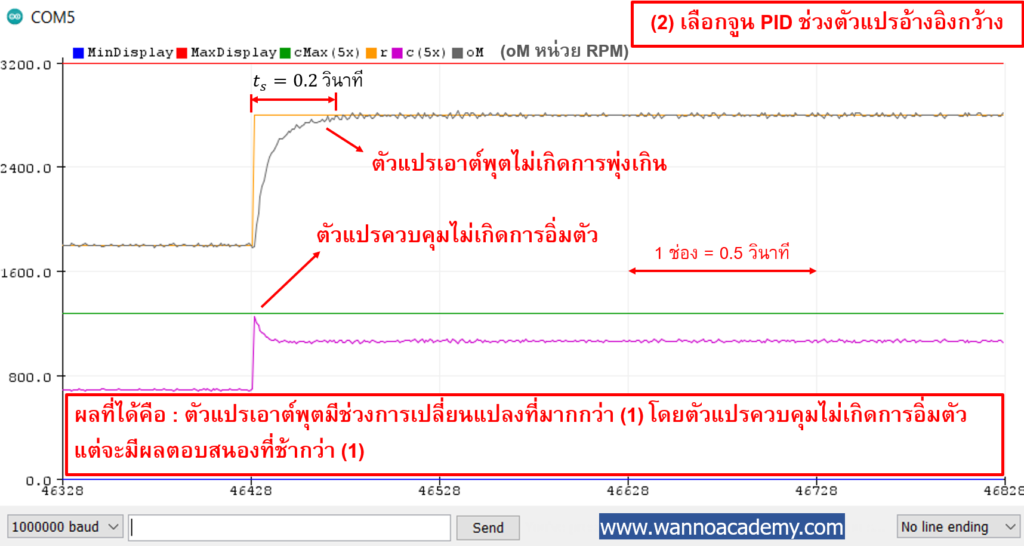
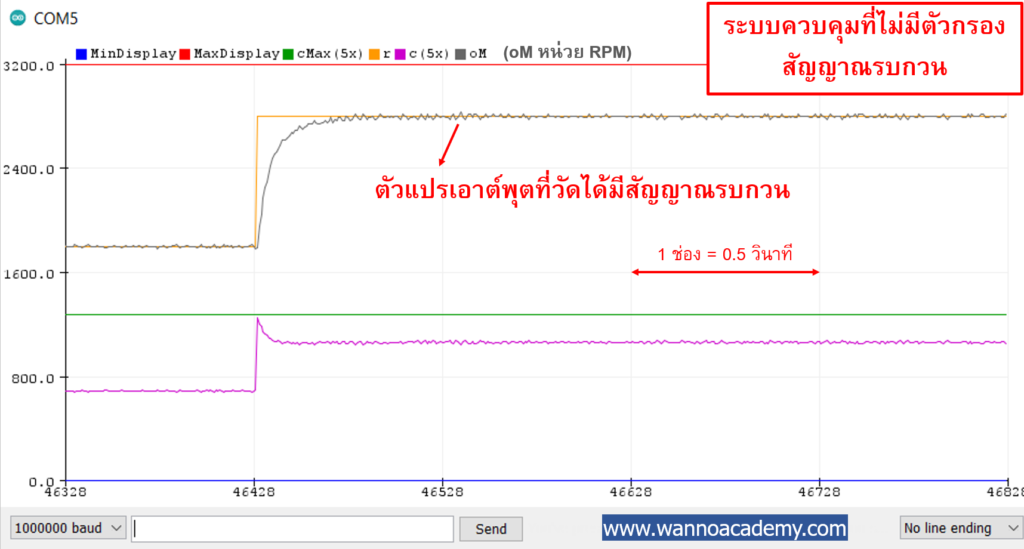
ประกาศ! คอร์สนี้ได้ยุติการขายแล้วครับ คอร์สการจูนตัวควบคุม PID ***คอร์สนี้กำลังอยู่ในช่วงการจัดทำ*** “เทคนิคและขั้นตอนในการจูนตัวควบคุม PID ในคอร์สนี้ ผมได้คิดค้นและวิจัยขึ้นมาใหม่ ซึ่งเป็นเทคนิคและขั้นตอนที่ง่ายไม่ซับซ้อน แต่ทำให้ได้ผลลัพธ์ที่ดีตามคุณสมบัติที่ได้ระบุไว้” ที่มาของคอร์สการจูนตัวควบคุม PID หากท่านเคยได้ทดลองจูนตัวควบคุม PID ท่านจะรู้ว่าการจูนตัวควบคุม PID ให้ได้ผลตอบสนองตามที่ท่านต้องการนั้นมันเป็นเรื่องยากเลยที่เดียว ปัญหาที่ท่านอาจจะเคยเจอได้แก่– เกิดค่าความผิดพลาด ตัวแปรเอาต์พุตไม่เข้าสู่ค่าตัวแปรอ้างอิง– ตัวแปรเอาต์พุตเกิดการพุ่งเกินและการพุ่งต่ำที่มีค่ามาก– หากตัวแปรเอาต์พุตเมื่อเกิดการพุ่งเกินแล้ว จะช้ามากกว่าจะกลับเข้าสู่ค่าตัวแปรอ้างอิง– คุณสมบัติของผลตอบสนอง (รูปร่าง ความเร็ว) แตกต่างไปจากเดิมมากเมื่อตัวแปรอ้างอิงมีการเปลี่ยนแปลง– ตัวแปรเอาต์พุตไม่นิ่ง เกิดการแกว่งไปมาด้วยขนาดที่สูง อันเนื่องมาจากสัญญาณรบกวนที่เข้ามาในระบบ สิ่งที่ท่านจะได้รับจากคอร์สการจูนตัวควบคุม PID คอร์สการจูนตัวควบคุม PID นี้ เป็นคอร์สที่ต่อเนื่องจากคอร์สตัวควบคุม PID ขั้นพื้นฐาน คอร์สนี้ได้ถูกคิดค้นและวิจัยขึ้นมาเพื่อแก้ไขปัญหาต่างๆ ดังที่ได้กล่าวผ่านมาแล้ว ผลการจูนโดยการใช้ขั้นตอนในคอร์สนี้จะทำให้ได้คุณสมบัติของผลตอบสนองของระบบควบคุมเป็นดังต่อไปนี้ (1) ตัวแปรควบคุมของตัวควบคุม PID จะไม่เกิดการอิ่มตัวในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้ขณะทำการควบคุม (ตัวแปรควบคุมอาจจะถึงค่าสูงสุดเพียงแค่นิดเดียว แต่จะไม่ส่งผลอย่างมีนัยสำคัญต่อการควบคุม) (2) ตัวแปรเอาต์พุตไม่เกิดการพุ่งเกินและการพุ่งต่ำในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้ (3) ผลตอบสนองของตัวแปรเอาต์พุตมีช่วงเวลาเข้าที่รวดเร็ว (หรืออาจจะเร็วที่สุด) ในแต่ละช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้ (4) ผลตอบสนองของตัวแปรเอาต์พุตจะยังคงมีคุณสมบัติ (รูปร่าง ความเร็ว) ใกล้เคียงกัน เมื่อมีการเปลี่ยนแปลงภายในช่วงของตัวแปรอ้างอิงที่ได้เลือกไว้ (5) การใส่ตัวกรองดิจิทัลที่เหมาะสมเข้าไปในระบบควบคุมแล้วจูนตัวควบคุม PID ตามขั้นตอน จะทำให้ตัวแปรเอาต์พุตเกิดการแกว่งไปมาน้อยลงกว่าเดิม ถึงแม้จะมีสัญญาณรบกวนเข้ามาในระบบควบคุม หมายเหตุ: หากท่านได้เรียนคอร์สตัวควบคุม PID ขั้นพื้นฐานแล้วนำไปประยุกต์ใช้ในงานของท่าน ทำให้งานของท่านได้คุณสมบัติของการควบคุมเป็นไปตามที่ท่านต้องการ ก็ไม่จำเป็นต้องเรียนคอร์สนี้ เนื้อหาและตัวอย่างผลการทดลองที่อยู่ภายในคอร์ส โดยเนื้อหาและตัวอย่างที่อยู่ภายในคอร์สการจูนตัวควบคุม PID มีดังนี้คือ(หมายเหตุ: เนื้อหาที่แสดงอาจจะมีการลดหรือเพิ่มเติมอีกเล็กน้อยตามความเหมาะสมในช่วงการจัดทำขั้นตอนสุดท้าย) บทที่ 1 แนะนำคอร์สการจูนตัวควบคุม PID บทที่ 2 ผลตอบสนองของระบบเมื่อปรับแต่งอัตราขยายของตัวควบคุม PID บทที่ 3 ขั้นตอนการจูนตัวควบคุม PID สำหรับระบบที่มีผลตอบสนองเร็วส่วนหนึ่งของผลการทดลองในบทนี้ ระบบควบคุมแรงดันเอาต์พุตของวงจร RC การเปรียบเทียบสมรรถณะ PID ด้วยวิธีในคอร์ส PID ขั้นพื้นฐานกับวิธีการจูนในคอร์สนี้ในระบบควบคุมแรงดันเอาต์พุตของวงจร RC ระบบควบคุมความเร็วรอบของมอเตอร์ไฟฟ้ากระแสตรง การเปรียบเทียบสมรรถณะการจูน PID ระหว่าง (1) เลือกจูน PID ช่วงตัวแปรอ้างอิงแคบ กับ (2) เลือกจูน PID ช่วงตัวแปรอ้างอิงกว้าง บทที่ 4 ตัวกรองแบบดิจิทัลและการจูน PIDส่วนหนึ่งของผลการทดลองในบทนี้ ระบบควบคุมแรงดันเอาต์พุตของวงจร RC การเปรียบเทียบสมรรถณะของระบบควบคุมที่มีและไม่มีตัวกรองสัญญาณรบกวนในระบบควบคุมแรงดันเอาต์พุตของวงจร RC ระบบควบคุมความเร็วรอบของมอเตอร์ไฟฟ้ากระแสตรง การเปรียบเทียบสมรรถณะของระบบควบคุมที่มีและไม่มีตัวกรองสัญญาณรบกวนในระบบควบคุมความเร็วรอบของมอเตอร์ไฟฟ้ากระแสตรง